8. Open Rails Physics
Open Rails physics is in an advanced stage of development. The physics
structure is divided into logical classes; more generic classes are parent
classes, more specialized classes inherit properties and methods of their
parent class. Therefore, the description for train cars physics is also
valid for locomotives (because a locomotive is a special case of a train
car). All parameters are defined within the .wag or .eng file. The
definition is based on MSTS file format and some additional ORTS based
parameters. To avoid possible conflicts in MSTS, the ORTS prefix is
added to every OpenRails specific parameter (such as
ORTSMaxTractiveForceCurves).
The .wag or .eng file may be placed as in MSTS in the
TRAINS\TRAINSET\TrainCar\ folder (where TrainCar is the name of the
train car folder). If OR-specific parameters are used, or if different
.wag or .eng files are used for MSTS and OR, the preferred solution is to
place the OR-specific .wag or .eng file in a created folder
TRAINS\TRAINSET\TrainCar\OpenRails\ (see here
for more).
For a full list of parameters, see Developing OR Content - Parameters and Tokens
8.1. Train Cars (WAG, or Wagon Part of ENG file)
The behavior of a train car is mainly defined by a resistance / resistive force (a force needed to pull a car). Train car physics also includes coupler slack and braking. In the description below, the Wagon section of the WAG / ENG file is discussed.
8.1.1. Resistive Forces
Open Rails physics calculates resistance based on real world principles: gravity, mass, wind, rolling resistance, and curve resistance. This is calculated individually for each car in the train.
The program supports a few methods for determining rolling resistance.
The oldest method, intended only to support legacy content, uses the
Friction parameters in the Wagon section of .wag/.eng file.
Open Rails identifies whether the .wag file used the FCalc utility or
other friction data. If FCalc was used to determine the Friction variables
within the .wag file, Open Rails attempts to determine the Davis coefficients
originally used to derive the Friction parameters. If no FCalc Friction
parameters are used in the .wag file, Open Rails ignores those values,
substituting resistance calculated by the original 1923 Davis equation.
For new content, it is preferred to not use the Friction parameters,
and instead enter the Davis coefficients directly as this is more
prototypical. In the Wagon section, the parameters ORTSDavis_A,
ORTSDavis_B, and ORTSDavis_C can be used to provide these values.
When using this method, the wagon section should also specify the type of
wheel bearings used with the ORTSBearingType parameter.
These values are then used in a generic form of the Davis formula:
Fres = ORTSDavis_A + speedMpS * (ORTSDavis_B + ORTSDavis_C * speedMpS2)
Where Fres is the friction force of the car when travelling at a speed of speedMpS. Note that in this formula, unlike the empirical Davis formula, the weight of the rolling stock and the number of axles are not considered by this equation; the ORTSDavis values must be set already accounting for the weight and number of axles. Accepted units of measure for ORTSDavis parameters and the list of bearing types can be found in the required parameters table.
In the case that ORTSDavis coefficients are not known or prove awkward to calculate,
Open Rails can automatically calculate rolling resistance using other data
in combination with the 1926 Davis equation (for grease and friction bearings)
or the 1992 CN equation (for roller and low bearings). If given a supported
ORTSBearingType, missing A and B coefficients will be found from the rail
vehicle weight and number of axles. Likewise, if the C coefficient is missing it
is automatically calculated from the ORTSWagonFrontalArea and
ORTSDavisDragConstant values (or defaults, if those are missing).
While the auto-calculated results will be reasonable for standard rolling stock,
manual entry of ORTSDavis coefficients is still preferred for more complicated
rolling stock such as steam locomotives, multiple units, high speed trains,
articulated units, and anything studied in experiments other than Davis.
The various forms of Davis equation are only accurate above 5 mph or so. They
prove inaccurate at low speeds as additional force is needed to overcome
the initial higher bearing torque (forces) and track resistance. Starting resistance
is calculated automatically by Open Rails based upon environmental conditions
and the setting of ORTSBearingType. Each bearing type has a different starting
resistance profile based on empirical prototypical data, including consideration
for the temperature of the bearing, wagon (axle) load, and wheel diameter. Hence
when using the OR calculation the correct values should be inserted in ORTSNumberAxles
parameter in the wagon section, and ORTSNumberDriveAxles in the engine section. The
WheelRadius value should also be inserted in both sections as appropriate.
Alternatively the low-speed friction force can be manually specified by the user by
setting the zero-speed force in ORTSStandstillFriction and the speed at which the
regular Davis equation takes over with ORTSMergeSpeed.
When running on a curve and if the
Curve dependent resistance option is
enabled, additional resistance is calculated, based on the curve radius,
rigid wheel base, track gauge and superelevation. The curve resistance
has its lowest value at the curve’s optimal speed. Running at higher or
lower speed causes higher curve resistance. The worst situation is
starting a train from zero speed. The track gauge value can be set by
ORTSTrackGauge parameter, otherwise the gauge is assumed to be the
gauge specified in the route’s .trk file. The rigid wheel base
can be also set by ORTSRigidWheelBase, otherwise the value is estimated.
Further details are discussed later.
When running on a slope (uphill or downhill), additional resistance is
calculated based on the car mass taking into account the elevation of the
car itself. Interaction with the car vibration feature is a known issue
(if the car vibrates the resistance value oscillate).
8.1.2. Coupler Slack
Slack action for couplers is introduced and calculated the same way as in MSTS.
8.1.3. Hot Wheel Bearings
Open Rails (OR) has instead used a representative bearing heat model to simulate the typical outcomes for bearing temperature heating or cooling effects.
Bearing heats up and cools down as the train moves and stops.
Bearing resistance in cold weather is significantly higher then when the bearing is at its ‘normal’ operating temperature. Typically railway companies elected to reduce loads for trains in cold conditions. The OR model will reduce the car resistance as the bearing heats up, and it will increase resistance as the bearing cools down.
OR has a built in temperature model to determine the ambient temperature. The ambient temperature is calculated based upon a world model of the average temperatures at various latitudes. OR will use the latitude of the route to calculate the ambient temperature. As ambient temperature also decreases with height above sea level, OR takes this into account as well, and varies the temperature accordingly.
Depending upon the
ActivityRandomizationLevelsetting in the Option menu, an overheating bearing (hotbox) may be randomly initialized on any trailing car in the train (locomotives and tenders are excepted from overheating bearings). The Hotbox will be activated randomly within the first 66% of the activity duration. So for example, in an activity with a 20 minute duration, a hotbox will only be activiated in the first 12 minutes of the activity, if it has been initialised.
A special smoke effect, BearingHotboxFX, can be added adjacent to the wagon hot box.
This will be triggered if the bearing overheats.
8.1.4. Derailment Coefficient
The derailment coefficient indicates the likelihood that a car or wagon will derail, and is the ratio of the lateral force to vertical force acting on the wagon. This concept was first proposed by Nadal.
The higher the coefficient the higher the risk that a derailment will occur. Most railway companies tend to operate at a coefficient value of less then 0.8 as this gives a desireable safety margin for the car.
The OR calculated derailment coefficient is displayed in the Force Information HuD. The coefficient value will change colour to indicate the likelihood of the car derailing. White indicates normal operation, yellow provides a warning indication, whilst red indicates that derailment is extremely likely.
Open Rails uses some standard defaults that it uses to calculate the derailment coefficient, however if the modeler desires greater accuracy the following parameters can be added to the WAG/ENG file in the wagon section:
ORTSLengthBogieCentre - length between bogie centres.
ORTSLengthCarBody - Length between car ends (typically measured between the coupler pivot points).
ORTSLengthCouplerFace - length between coupler faces.
ORTSNumberAxles - number of axles on the car.
ORTSNumberDriveAxles - number of driven axles on the locomotive. NB: Total axles on locomotive will be
ORTSNumberAxles + ORTSNumberDriveAxles.
ORTSNumberBogies - number of bogies on the car.
8.1.5. Adhesion of Locomotives – Settings Within the Wagon Section of ENG files
MSTS calculates the adhesion parameters based on a very strange set of parameters filled with an even stranger range of values. Since ORTS is not able to mimic the MSTS calculation, a standard method based on the adhesion theory is used with some known issues in use with MSTS content.
MSTS Adheasion (sic!) parameters are not used in ORTS. Instead, a new
set of parameters is used, which must be inserted within the Wagon
section of the .ENG file:
ORTSAdhesion (
ORTSCurtius_Kniffler (A B C D )
)
The A, B and C values are coefficients of a standard form of various empirical formulas, e.g. Curtius-Kniffler or Kother. The D parameter is used in the advanced adhesion model described later.
From A, B and C a coefficient CK is computed, and the adhesion force limit is then calculated by multiplication of CK by the car mass and the acceleration of gravity (9.81), as better explained later.
The adhesion limit is only considered in the adhesion model of locomotives.
The adhesion model is calculated in two possible ways. The first one – the simple adhesion model – is based on a very simple threshold condition and works similarly to the MSTS adhesion model. The second one – the advanced adhesion model – is a dynamic model simulating the real world conditions on a wheel-to-rail contact and will be described later. The advanced adhesion model uses some additional parameters such as:
ORTSAdhesion (
ORTSSlipWarningThreshold ( T )
)
where T is the wheelslip percentage considered as a warning value to be displayed to the driver; and:
ORTSAdhesion(
Wheelset (
Axle (
ORTSInertia (
Inertia
)
)
)
)
where Inertia is the model inertia in kg.m2 and can be set to adjust the advanced adhesion model dynamics. The value considers the inertia of all the axles and traction drives. If not set, the value is estimated from the locomotive mass and maximal power.
By inserting multiple “Axle” sections in the above configuration, multiple indpependent wheelsets can be defined which will operate independently of each other. The following parameters can be inserted to characterise the performance of the wheelset.
AnimatedParts - animated parts associated with the axles wheelset.
Weight - weight on the axles in the wheelset.
ORTSRadius - radius of the wheels in the wheelset.
NumberWheelsetAxles - number of axles in the wheelset.
ORTSFlangeAngle - flange angle of the wheels in the wheelset.
ORTSInertia - inertia of the wheels in the wheelset.
AxleRailTractionType - indicates the type of rail traction for the axle.
Valid inputs are Rack, Rack_Adhesion or Adhesion.
The first model – simple adhesion model – is a simple tractive force condition-based computation. If the tractive force reaches its actual maximum, the wheel slip is indicated in HUD view and the tractive force falls to 10% of the previous value. By reducing the throttle setting adherence is regained. This is called the simple adhesion model.
The second adhesion model (advanced adhesion model) is based on a simplified dynamic adhesion theory. Very briefly, there is always some speed difference between the wheel speed of the locomotive and the longitudinal train speed when the tractive force is different from zero. This difference is called wheel slip / wheel creep. The adhesion status is indicated in the HUD Force Information view by the Wheel Slip parameter and as a warning in the general area of the HUD view. For simplicity, only one axle model is computed (and animated). A tilting feature and the independent axle adhesion model will be introduced in the future.
The advanced adhesion model uses two alternate algorithms to calculate the wheel adhesion. The first model is based upon an algorithm by Pacha, whilst the second uses an algorithm developed by Polach. The Polach algorithm provides a more accurate outcome and facilitates the future inclusion of track conditions. However due to the number of algorithm steps required to calculate the wheel adhesion value, it is more CPU load-intensive then the Pacha one. On low performance PCs, this would lower the frame rate for the screen display to an unacceptable degree.
To avoid this, OR senses the frame rate and switches from the Polach algorithm to the Pacha one as follows. If the frame rate falls below 30 fps, then a switch is made to Pacha until the frame rate recovers to more than 40 fps. If a switch to Pacha happens more than once in a 5 minute interval then it will persist for the rest of the session.
In this way OR provides a more accurate algorithm whilst retaining the original one for lower specification computers. When OR is using the Pacha algorithm, the “Wheel Adh (Max)” values will both read 99%, whereas when the Polach algorithm is being used these values will be around the expected values of 30-55%.
The heart of the adhesion algorithm is the slip characteristics (pictured below).
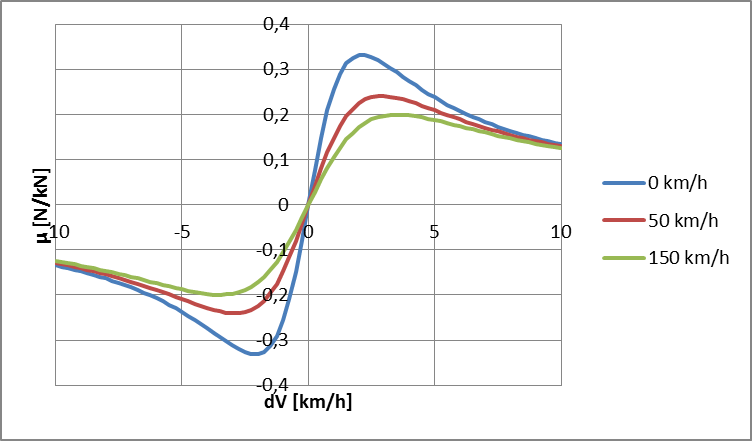
The wheel creep describes the stable area of the characteristics and is used in the most of the operation time. When the tractive force reaches the actual maximum of the slip characteristics, force transition falls down and more power is used to speed up the wheels, so called wheel slip.
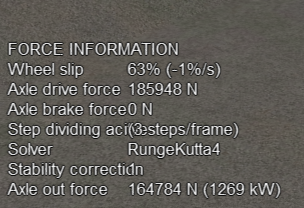
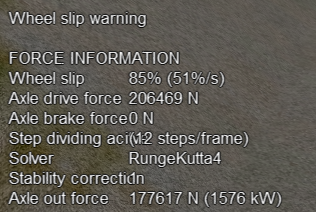
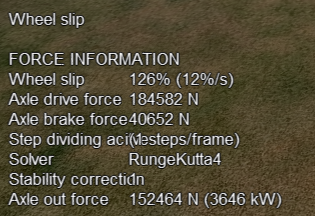
To avoid the loss of the tractive force, use the throttle in combination
with sanding to return to the stable area (wheel creep area). A possible
sequence of the wheel slip development is shown on the pictures below. The
Wheel slip value is displayed as a value relative to the best adhesion
conditions for actual speed and weather. The value of 63% means very good
force transition. For values higher than ( ORTSadhesion (
ORTSSlipWarningThreshold ) ) or 70% by default, the Wheel slip
warning is displayed, but the force transition is still very good. This
indication should warn you to use the throttle very carefully. Exceeding
100%, the Wheel slip message is displayed and the wheels are starting
to speed up, which can be seen on the speedometer or in external view 2.
To reduce the wheel slip, use throttle down, sanding or the locomotive
brake.
The actual maximum of the tractive force is based on the
Curtius-Kniffler adhesion theory and can be adjusted by the aforementioned
ORTSCurtius_Kniffler ( A B C D ) parameters, where A, B, C are
coefficients of Curtius-Kniffler, Kother or similar formula. By default,
Curtius-Kniffler is used.
Where W is the weather coefficient. This means that the maximum is
related to the speed of the train, or to the weather conditions.
The D parameter is used in an advanced adhesion model and should
always be 0.7.
There are some additional parameters in the Force Information HUD view. The axle/wheel is driven by the Axle drive force and braked by the Axle brake force. The Axle out force is the output force of the adhesion model (used to pull the train). To compute the model correctly the FPS rate needs to be divided by a Solver dividing value in a range from 1 to 50. By default, the Runge-Kutta4 solver is used to obtain the best results.
In some cases when the CPU load is high, the time step for the computation
may become very high and the simulation may start to oscillate (the
Wheel slip rate of change (in the brackets) becomes very high).
You can use the DebugResetWheelSlip (<Ctrl+X> keys by default)
command to reset the adhesion model. If you experience such behavior most
of time, use the basic adhesion model instead by pressing
DebugToggleAdvancedAdhesion ( <Ctrl+Alt+X> keys by default).
To match some of the real world features, the Wheel slip event can
cause automatic zero throttle setting. Use the Engine (ORTS
(ORTSWheelSlipCausesThrottleDown)) Boolean value of the ENG file.
Modern locomotives have slip control systems which automatically adjust
power, providing an optimal tractive effort avoiding wheel slip.
The ORTSSlipControlSystem ( Full ) parameter can be inserted
into the engine section of the .eng file to indicate the presence of
such system.
Steam locomotives will have varying magnitude of rotational forces depending upon the separation between the cylinder crank angles.
The crank angles for example of a 2 cylinder locomotive has a 90 deg separation whereas a 3 cylinder locomotive has a 120 deg variation. OR will default to a “common” value for the number of cylinders defined, but the user can override this with “ORTSWheelCrankAngleDifference ( A B C D )”, where A, B, C and D are the separations for up to a 4 cylinder locomotive. For example, a 4 cylinder locomotive can have a separation of 90 deg for each cylinder or sometimes it has two of the cranks separated by 45 deg instead. These values can either be in Rad (default) or Deg. The separations should be described around the full 360 deg of rotation, so for example, a 3 cylinder locomotive would be - ORTSWheelCrankAngleDifference ( 0deg, 120deg, 240deg ).
8.1.6. Rack Railway Operation
Whilst the steepest adhesion track gradient is 1 in 7.2 ( 13.8% ), this gradient will significantly reduce the load that can be hauled up the gradient, so often railway designers elect to add a cog wheel to the train which engages a rack rail in the track, and by this method the train is able to haul itself up the hill without any wheel slippage.
In regards to steam rack locomotives there are potentially three different types, as follows:
Pure Rack Locomotive - which has wheels supporting its weight, but is driven only by a Cog wheel.
b) Combined Rack and Adhesion locomotive - this type has two different steam engines, with one driving the rack cog wheel, and one driving the adhesion wheels.
c) Rack locomotive with driven adhesion wheels - in this variation the Cog wheel is on the same drive axle as the adhesion wheels. This type of locomotive could run on adhesion tracks as well as rack tracks.
To configure a rack railway operation into OR, the following parameters need to be configured into the files indicated.
In the TSECTION.DAT file add the entry
ORTSRackShape ( )into all the track shapes that have rack rails included.In the Rack locomotive ENG file it will be necessary to add one or more Steam Engines
depending upon the type of rack locomotive being crerated.
It will also be necessary to define which axles are Adhesion or Rack driven. This can be done by adjusting the Axles parameters.
In the WAG file (for wagons only) add the entry
BrakingCogWheelFittedto indicate that the cog wheel is used for braking.
This configuration should eliminate all wheel slip and skids when the train is on a rack section of track.
8.1.7. Riggenbach Counter Pressure Brake
To assist in braking some steam locomotives were fitted with Counter Pressure Braking system. Either steam or air could be used. A series of valves were fitted around the steam cylinder which allowed the cylinder to be reconfigured as a either and air compressor or to reverse the steam operation. This created a retarding force which could be used to brake the locomotive.
To set this feature up the following parametrs need to be add:
ORTSCounterPressureBraking - is added to the engine section of the ENG file, and set to true if a Riggenbach brake has been fitted to the locomotive.
This will apply for all steam locomotives with only one steam engine.
CounterPressureBraking - for locomotives with multiple steam engines on the same locomotive (such as a rack locomotive) then this value is set to true
within the steam engine block that provides the counter pressure braking.
- Two steam effects are provided to model the exhaust steam from the counter pressure braking. These effects can be enabled by adding
CounterPressureBrake1FX and
CounterPressureBrake2FXto the locomotive steam effects.
Steam effects can be added to the locomotive by using sound trigger 323 to turn the sounds ON, and 324 to turn the sounds OFF.
8.2. Engine – Classes of Motive Power
Open Rails software provides for different classes of engines: diesel, electric, steam, control and default. If needed, additional classes can be created with unique performance characteristics.
8.2.1. Diesel Locomotives
8.2.1.1. Diesel Locomotives in General
The diesel locomotive model in ORTS simulates the behavior of two basic
types of diesel engine driven locomotives– diesel-electric and
diesel-mechanical. The diesel engine model is the same for both types, but
acts differently because of the different type of load. Basic controls
(direction, throttle, and brakes) are common across all
classes of engines. Diesel engines can be started or stopped by pressing
the START/STOP key (<Shift+Y> in English keyboards). The starting and
stopping sequence is driven by a starter logic, which can be customized,
or is estimated by the engine parameters.
The diesel electric locomotive uses a diesel prime mover to generate electricity (using generators naturally) and this electricity is then used to drive traction motors to turn the wheels. The other types of diesel locomotives are similar from the perspective that they have a diesel prime mover, and then some form of transmission mechanism to transfer the power output of the prime mover to the locomotive wheels.
In configuring the locomitve correctly it is important to use the correct power/force values. The key values required in the ENG file for a diesel locomotive (regardless of transmission type) are as follows:
ORTSDieselEngineMaxPower ==> sets the maximum power output at the
shaft of the diesel engine (or prime mover).
MaxPower ==> sets the maximum power at the rail (provided to the wheels).
MaxForce ==> sets the force that the locomotive is able to apply to the
wheels when starting.
MaxContinuousForce ==> is the maximum force that the locomotive can
continuously supply to the wheels without exceeding the design specifications.
Typically this is linked to a particular speed (see next parameter).
ORTSTractiveForceIsPowerLimited ==> determines if tractive force curves
shall be limited to the available output power from the diesel engine.
ORTSSpeedOfMaxContinuousForce ==> is the speed at which the maximum force
will be applied.
MaxVelocity ==> is the maximum rated design speed of the locomotive.
Some locomotives had a speed alarm which applied the brakes, or set the throttle
to a lower value. This can be modelled using the OverspeedMonitor function.
ORTSUnloadingSpeed ==> is the locomotive speed when the generator reaches
its maximum voltage, and due to the speed of the train, the engine starts
to ‘unload’. Typically beyond this speed, power output of the locomotive
will decrease.
If using power/force Tables, then some of the above values will not be required, see the sections below for details.
8.2.1.1.1. Starting the Diesel Engine
To start the engine, simply press the START/STOP key once. The direction controller must be in the neutral position (otherwise, a warning message pops up). The engine RPM (revolutions per minute) will increase according to its speed curve parameters (described later). When the RPM reaches 90% of StartingRPM (67% of IdleRPM by default), the fuel starts to flow and the exhaust emission starts as well. RPM continues to increase up to StartingConfirmationRPM (110% of IdleRPM by default) and the demanded RPM is set to idle. The engine is now started and ready to operate.
8.2.1.1.2. Stopping the Diesel Engine
To stop the engine, press the START/STOP key once. The direction controller must be in the neutral position (otherwise, a warning message pops up). The fuel flow is cut off and the RPM will start to decrease according to its speed curve parameters. The engine is considered as fully stopped when RPM is zero. The engine can be restarted even while it is stopping (RPM is not zero).
8.2.1.1.3. Starting or Stopping Helper Diesel Engines
By pressing the Diesel helper START/STOP key (<Ctrl+Y> on English
keyboards), the diesel engines of helper locomotives can be started or
stopped. Also consider disconnecting the unit from the multiple-unit (MU)
signals instead of stopping the engine
(see here, Toggle MU connection).
It is also possible to operate a locomotive with the own engine off and the helper’s engine on.
8.2.1.1.4. ORTS Specific Diesel Engine Definition
If no ORTS specific definition is found, a single diesel engine definition is created based on the MSTS settings. Since MSTS introduces a model without any data crosscheck, the behavior of MSTS and ORTS diesel locomotives can be very different. In MSTS, MaxPower is not considered in the same way and you can get much better performance than expected. In ORTS, diesel engines cannot be overloaded.
No matter which engine definition is used, the diesel engine is defined by its load characteristics (maximum output power vs. speed) for optimal fuel flow and/or mechanical characteristics (output torque vs. speed) for maximum fuel flow. The model computes output power / torque according to these characteristics and the throttle settings. If the characteristics are not defined (as they are in the example below), they are calculated based on the MSTS data and common normalized characteristics.
In many cases the throttle vs. speed curve is customized because power vs. speed is not linear. A default linear throttle vs. speed characteristics is built in to avoid engine overloading at lower throttle settings. Nevertheless, it is recommended to adjust the table below to get more realistic behavior.
In ORTS, single or multiple engines can be set for one locomotive. In case
there is more than one engine, other engines act like helper engines
(start/stop control for helpers is <Ctrl+Y> by default). The power of
each active engine is added to the locomotive power. The number of such
diesel engines is not limited.
If the ORTS specific definition is used, each parameter is tracked and if one is missing (except in the case of those marked with Optional), the simulation falls back to use MSTS parameters.
Engine(
...
ORTSDieselEngines ( 2
Diesel (
IdleRPM ( 510 )
MaxRPM ( 1250 )
StartingRPM ( 400 )
StartingConfirmRPM ( 570 )
ChangeUpRPMpS ( 50 )
ChangeDownRPMpS ( 20 )
RateOfChangeUpRPMpSS ( 5 )
RateOfChangeDownRPMpSS ( 5 )
MaximalPower ( 300kW )
IdleExhaust ( 5 )
MaxExhaust ( 50 )
ExhaustDynamics ( 10 )
ExhaustDynamicsDown (10)
ExhaustColor ( 00 fe )
ExhaustTransientColor(
00 00 00 00)
DieselPowerTab (
0 0
510 2000
520 5000
600 2000
800 70000
1000 100000
1100 200000
1200 280000
1250 300000
)
DieselConsumptionTab (
0 0
510 10
1250 245
)
ThrottleRPMTab (
0 510
5 520
10 600
20 700
50 1000
75 1200
100 1250
)
DieselTorqueTab (
0 0
510 25000
1250 200000
)
MinOilPressure ( 40 )
MaxOilPressure ( 90 )
MaxTemperature ( 120 )
Cooling ( 3 )
TempTimeConstant ( 720 )
OptTemperature ( 90 )
IdleTemperature ( 70 )
)
Diesel ( ... )
|
Engine section in eng file
Number of engines
Idle RPM
Maximal RPM
Starting RPM
Starting confirmation RPM
Increasing change rate RPM/s
Decreasing change rate RPM/s
Jerk of ChangeUpRPMpS RPM/s^2
Jerk of ChangeDownRPMpS RPM/s^2
Maximal output power
Num of exhaust particles at IdleRPM
Num of exhaust particles at MaxRPM
Exhaust particle mult. at transient
Mult. for down transient (Optional)
Exhaust color at steady state
Exhaust color at RPM changing
Diesel engine power table
RPM Power in Watts
Diesel fuel consumption table
RPM Vs consumption l/h/rpm
Eengine RPM vs. throttle table
Throttle % Demanded RPM
Diesel engine RPM vs. torque table
RPM Force in Newtons
Min oil pressure PSI
Max oil pressure PSI
Maximal temperature Celsius
Cooling 0=No cooling, 1=Mechanical,
2= Hysteresis, 3=Proportional
Rate of temperature change
Normal temperature Celsius
Idle temperature Celsius
The same as above, or different
|
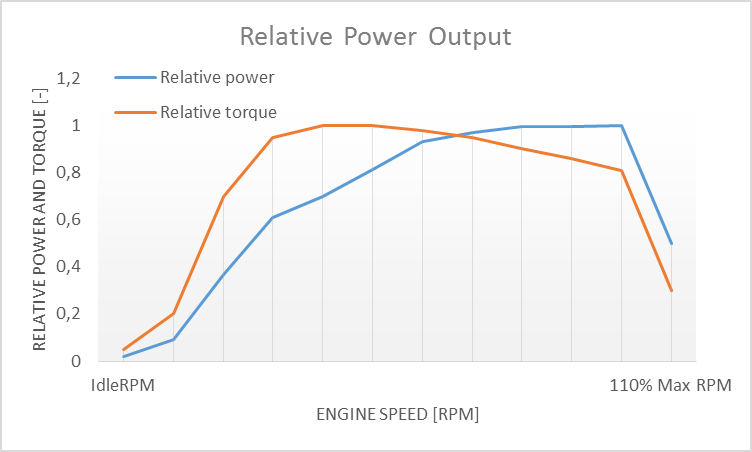
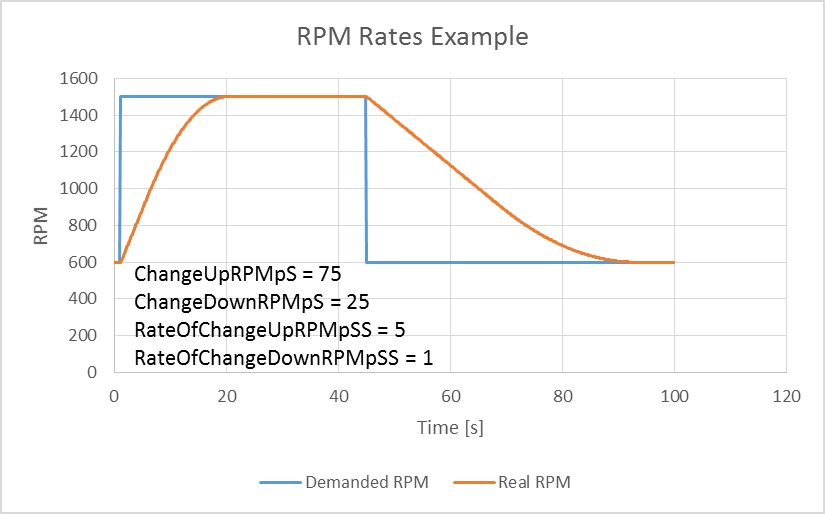
8.2.1.1.5. Diesel Engine Speed Behavior
The engine speed is calculated based on the RPM rate of change and its
rate of change. The usual setting and the corresponding result is shown
below. ChangeUpRPMpS means the slope of RPM, RateOfChangeUpRPMpSS
means how fast the RPM approaches the demanded RPM.
8.2.1.1.6. Fuel Consumption
Following the MSTS model, ORTS computes the diesel engine fuel consumption based on .eng file parameters. The fuel flow and level are indicated by the HUD view. Final fuel consumption is adjusted according to the current diesel power output (load).
8.2.1.1.7. Diesel Exhaust
The diesel engine exhaust feature can be modified as needed. The main idea
of this feature is based on the general combustion engine exhaust. When
operating in a steady state, the color of the exhaust is given by the new
ENG parameter engine (ORTS (Diesel (ExhaustColor))).
The amount of particles emitted is given by a linear interpolation of the
values of engine(ORTS (Diesel (IdleExhaust))) and engine(ORTS (Diesel
(MaxExhaust))) in the range from 1 to 50. In a transient state, the
amount of the fuel increases but the combustion is not optimal. Thus, the
quantity of particles is temporarily higher: e.g. multiplied by the value
of
engine(ORTS (Diesel (ExhaustDynamics))) and displayed with the color
given by engine(ORTS(Diesel(ExhaustTransientColor))).
The format of the color value is (aarrggbb) where:
aa = intensity of light;
rr = red color component;
gg = green color component;
bb = blue color component;
and each component is in HEX number format (00 to ff).
8.2.1.1.8. Cooling System
ORTS introduces a simple cooling and oil system within the diesel engine model. The engine temperature is based on the output power and the cooling system output. A maximum value of 100°C can be reached with no impact on performance. It is just an indicator, but the impact on the engine’s performance will be implemented later. The oil pressure feature is simplified and the value is proportional to the RPM. There will be further improvements of the system later.
8.2.1.2. Diesel-Electric Locomotives
Diesel-electric locomotives are driven by electric traction motors supplied by a diesel-generator set. The gen-set is the only power source available, thus the diesel engine power also supplies auxiliaries and other loads. Therefore, the output power will always be lower than the diesel engine rated power.
In ORTS, the diesel-electric locomotive can use
ORTSTractionCharacteristics or tables of ORTSMaxTractiveForceCurves
to provide a better approximation to real world performance. If a table is
not used, the tractive force is limited by MaxForce, MaxPower and
MaxVelocity. The throttle setting is passed to the ThrottleRPMTab, where
the RPM demand is selected. The output force increases with the Throttle
setting, but the power follows maximal output power available (RPM
dependent).
8.2.1.3. Diesel-Hydraulic Locomotives
Diesel-hydraulic locomotives are not implemented in ORTS. However, by
using either ORTSTractionCharacteristics or ORTSMaxTractiveForceCurves
tables, the desired performance can be achieved, when no gearbox is in use
and the DieselEngineType is electric.
8.2.1.4. Diesel-Mechanical Locomotives
ORTS features a mechanical gearbox feature that mimics MSTS behavior,
including automatic or manual shifting. Some features not well described
in MSTS are not yet implemented, such as GearBoxBackLoadForce,
GearBoxCoastingForce and GearBoxEngineBraking.
Output performance is very different compared with MSTS. The output force is computed using the diesel engine torque characteristics to get results that are more precise.
To indicate that the diesel is a mechanical transmission, ORTSDieselTransmissionType
needs to be set to “Mechanic”.
Two ORTS mechanical gearbox configurations can be set up.
These three gearboxes can be selected by the use of the following parameter:
ORTSGearBoxType ( A ) - represents a semi-automatic pre-selector gearbox that gives
a continuous power output that is not interrupted when changing gears.
ORTSGearBoxType ( B ) - represents a semi-automatic pre-selector type gear box where
although there is a break in tractive effort when changing from one gear to another,
the engine speed is reduced by a shaft brake if needed, so that there is no need for
the driver to adjust the throttle.
ORTSGearBoxType ( C ) - represents a semi-automatic pre-selector type gear box where
there is a need for the driver to adjust the throttle before making a gear change.
One of three possible types of main clutch are selectable for each of the above gear box types, as follows:
ORTSMainClutchType ( Friction ) - represents a mechanical friction clutch.
ORTSMainClutchType ( Fluid ) - represents a fluid coupling. Where a transmission includes
both a friction clutch and a fluid coupling then ORTSMainClutchType ( “Fluid” ) should be
used in the eng file.
ORTSMainClutchType ( Scoop ) - represents a fluid coupling that includes a scoop device to
disconnect the engine from the transmission at idle speed.
ORTSGearBoxFreeWheel - indicates whether a freewheel mechanism is included in the transmission.
( 0 ) - should be used for transmissions that do not include a freewheel. This option will allow
‘engine braking’ to occur when appropriate.
( 1 ) - should be used for transmissions that include a freewheel. This option will allow the train
to coast with the engine in gear.
GearBoxNumberOfGears - The number of gears available in the gear box.
Currently a BASIC model configuration is available (ie no user defined traction curves or diesel engine curves are supported), or an ADVANCED configuration (ie the user defines the diesel engine parameters including the torque curve. Two diesel engines of the same type can be installed on the same locomotive or railcar using the advanced diesel engine block. Where two engines are installed it is assumed they will each drive a separate axle or bogie via a separate, identical gear box. Two or more locomotives or power cars in the same consist should also now operate correctly.
OR calculates the tractive force curves for each gear based on the “inbuilt” torque curve of a typical diesel engine.
GearBoxMaxSpeedForGears - sets the maximum speed for each gear, corresponding to maximum engine
rpm and maximum power . As an example, the values for a typical British Railways first generation dmu are:
GearBoxMaxSpeedForGears( 15.3 27 41 65.5 ) - The default values are in mph, although other units can be entered.
In the above case the maximum permitted speed of the train is 70 mph; a small amount of ‘overspeed’ being allowed
in top gear. The fourth gear speed of 65.5 mph corresponds to the maximum engine rpm set in the eng file by
DieselEngineMaxRPM. The diesel engine may continue to ‘runaway’ above its normal ‘maximum speed’ until it reaches the maximum governed speed or ‘redline’ speed at which the engine governor will cut off the fuel supply until the engine speed is reduced. This speed can be set in basic Open Rails eng files usingORTSDieselEngineGovenorRpM. In the case of the above train, then these would be
DieselEngineMaxRPM( 1800 ) ORTSDieselEngineGovenorRpM ( 2000 )
If under any circumstances the engine reaches ORTSDieselEngineGovenorRpM then the diesel engine will automatically be shut down.
ORTSGearBoxTractiveForceAtSpeed - The tractive force available in each gear at the speed indicated in GearBoxMaxSpeedForGears. Units
by default are in N, however lbf, N or kN. Published values for tractive effort of geared locomotives and multiple units
are generally those at the maximum speed for each gear.
ORTSReverseGearboxIndication - Some gearboxes have a “reverse” gearing arrangement, ie N-4-3-2-1. This parameter allows the
gear selector to display gears in the correct order for this type of gearbox arrangement. If using this parameter, note in the
above example that GearBoxMaxSpeedForGears and ORTSGearBoxTractiveForceatSpeed need to list the gears in the order 4-3-2-1
rather than in ascending order.
Hence a typical gear configuration for a diesel mechanic locomotive might look like the following:
ORTSDieselTransmissionType ( Mechanic )
ORTSGearBoxType ( B ) ORTSMainClutchType ( “Friction” ) ORTSGearBoxFreeWheel ( 0 )
GearBoxOperation( Manual ) GearBoxNumberOfGears( 6 ) GearBoxMaxSpeedForGears( 4.5mph 6mph 9mph 14.5mph 21mph 33mph ) ORTSGearBoxTractiveForceatSpeed( 35400lbf 26600lbf 17700lbf 11200lbf 7600lbf 4830lbf )
8.2.1.5. Traction cut-off relay
The traction cut-off relay of all locomotives in a consist can be controlled by
Control Traction Cut-Off Relay Closing Order, Control Traction Cut-Off Relay Opening Order
and Control Traction Cut-Off Relay Closing Authorization commands
( <O>, <I> and <Shift+O> by default ). The status of the traction cut-off relay
is indicated by the Traction cut-off relay value in the HUD view.
The traction cut-off relay is also opened if the Train Control System triggers an emergency braking.
Two default behaviours are available:
By default, the traction cut-off relay of the train closes as soon as power is available on the engines.
The traction cut-off relay can also be controlled manually by the driver. To get this behaviour, put the parameter
ORTSTractionCutOffRelay( Manual )in the Engine section of the ENG file.
In order to model a different behaviour of the traction cut-off relay,
a scripting interface is available. The script
can be loaded with the parameter ORTSTractionCutOffRelay( <name of the file> ).
In real life, the traction cut-off relay does not
close instantly, so you can add a delay with the optional parameter
ORTSTractionCutOffRelayClosingDelay( ) (by default in seconds).
8.2.1.6. Power supply
The power status is indicated by the Power value in the HUD view.
The power-on sequence time delay can be adjusted by the optional
ORTSPowerOnDelay( ) value (for example: ORTSPowerOnDelay( 5s )) within
the Engine section of the .eng file (value in seconds). The same delay for
auxiliary systems can be adjusted by the optional parameter
ORTSAuxPowerOnDelay( ) (by default in seconds).
A scripting interface to customize the behavior of the power supply is also available.
8.2.2. Electric Locomotives
At the present time, diesel and electric locomotive physics calculations use the default engine physics. Default engine physics simply uses the MaxPower and MaxForce parameters to determine the pulling power of the engine, modified by the Reverser and Throttle positions. The locomotive physics can be replaced by traction characteristics (speed in mps vs. force in Newtons) as described below.
Some OR-specific parameters are available in order to improve the realism of the electric system.
8.2.2.1. Pantographs
The pantographs of all locomotives in a consist are triggered by
Control Pantograph First and Control Pantograph Second commands
( <P> and <Shift+P> by default ). The status of the pantographs
is indicated by the Pantographs value in the HUD view.
Since the simulator does not know whether the pantograph in the 3D model is up or down, you can set some additional parameters in order to add a delay between the time when the command to raise the pantograph is given and when the pantograph is actually up.
In order to do this, you can write in the Wagon section of your .eng file or .wag file (since the pantograph may be on a wagon) this optional structure:
ORTSPantographs(
Pantograph( << This is going to be your first pantograph.
Delay( 5s ) << Example : a delay of 5 seconds
)
Pantograph(
... parameters for the second pantograph ...
)
)
Other parameters will be added to this structure later, such as power limitations or speed restrictions.
8.2.2.2. 3rd and 4th Pantograph
Open Rails supports up to 4 pantographs per locomotive. If three or four pantographs are present, the above ORTSPantographs() block is mandatory, and must contain a number of Pantograph() blocks equal to the number of pantographs in the locomotive. The animation names of the 3rd and 4th pantograph follow the same rules valid for Pantograph 2 (replacing 2 with 3 and 4). The third panto is moved with Ctrl-P, while the fourth panto is moved with Ctrl-Shift-P. The cabview controls must be named ORTS_PANTOGRAPH3 and ORTS_PANTOGRAPH4.
8.2.2.3. Pantograph selector
When using customized power supply scripts:, it is possible to implement a pantograph selector that selects a specific pantograph combination direcly, without operating every pantograph control individually.
Example:
Engine (
ORTSPowerSupply ( "YourEPSScript.cs" )
ORTSPantographSelector (
Script ( Default )
SelectorPositions (
SelectorPosition (
Name ( "Zero" )
Default ()
)
SelectorPosition (
Name ( "Local" )
)
SelectorPosition (
Name ( "Rear" )
)
SelectorPosition (
Name ( "Front" )
)
SelectorPosition (
Name ( "All" )
)
)
)
)
In combination with a customized power supply script, you can use the pantograph selector to achieve different pantograph combinations, for example:
Position “Zero” would keep all pantographs down
Position “Local” would only raise the pantograph from the lead locomotive
Position “Rear” would raise the pantograph only of rear-facing locomotives (this is the usually
the standard position for EMUs, with only the rear pantograph being raised, and the front power head is powered through the roof line) - Position “Front” would raise the pantograph only of front-facing locomotives - Position “All” would raise all pantographs
Please note that this only works with custom scripts.
8.2.2.4. Voltage selector
When using customized power supply scripts:, it is possible to implement a voltage selector that automatically raises the pantograph associated to the selected voltage.
Example:
Engine (
ORTSPowerSupply ( "YourEPSScript.cs" )
ORTSVoltageSelector (
Script ( Default )
SelectorPositions (
SelectorPosition (
Name ( "AC" )
Voltage ( 25000 )
)
SelectorPosition (
Name ( "DC" )
Voltage ( 1500 )
)
)
)
)
Please note that this only works with custom scripts.
8.2.2.5. Power limitation selector
The power limitation selector allows limiting the total current drawn from the overhead wire.
Example:
Engine (
ORTSPowerLimitationSelector (
Script ( Default )
SelectorPositions (
SelectorPosition (
Name ( "Conventional line" )
MaxPower ( 1200kW )
Default()
)
SelectorPosition (
Name ( "High speed line" )
MaxPower ( 1800kW )
)
)
)
)
Depending on the controller position, the power consumption of every locomotive will be limited.
In combination with customized power supply scripts:, more advanced power limits can be imposed, e.g. depending on the number of locomotives in the trainset.
8.2.2.6. Circuit breaker
The circuit breaker of all locomotives in a consist can be controlled by
Control Circuit Breaker Closing Order, Control Circuit Breaker Opening Order
and Control Circuit Breaker Closing Authorization commands
( <O>, <I> and <Shift+O> by default ). The status of the circuit breaker
is indicated by the Circuit breaker value in the HUD view.
The circuit breaker is also opened if the Train Control System triggers an emergency braking.
Two default behaviours are available:
By default, the circuit breaker of the train closes as soon as power is available on the pantograph.
The circuit breaker can also be controlled manually by the driver. To get this behaviour, put the parameter
ORTSCircuitBreaker( Manual )in the Engine section of the ENG file.
In order to model a different behaviour of the circuit breaker,
a scripting interface is available. The script
can be loaded with the parameter ORTSCircuitBreaker( <name of the file> ).
In real life, the circuit breaker does not
close instantly, so you can add a delay with the optional parameter
ORTSCircuitBreakerClosingDelay( ) (by default in seconds).
8.2.2.7. Power supply
The power status is indicated by the Power value in the HUD view.
The power-on sequence time delay can be adjusted by the optional
ORTSPowerOnDelay( ) value (for example: ORTSPowerOnDelay( 5s )) within
the Engine section of the .eng file (value in seconds). The same delay for
auxiliary systems can be adjusted by the optional parameter
ORTSAuxPowerOnDelay( ) (by default in seconds).
A scripting interface to customize the behavior of the power supply is also available.
8.2.2.8. Traction motor type
There are different types of electric motors: series DC motors, asynchronous/synchronous AC motors, etc. Currently a simple AC induction motor has been implemented, and can be selected with the ``ORTSTractionMotorType ( AC ) `` parameter, to be inserted in the Engine section of the ENG file. The use of this motor will have an impact on wheel slip, because the wheel speed never exceeds the frequency of the rotating magnetic field.
8.2.2.9. Traction force retardation
When the driver sets full throttle, the control electronics may not apply the full
tractive force instantly, but it will instead linearly apply force until reaching
the target demand. This can be tuned both for traction and dynamic braking by inserting
ORTSTractiveForceRampUpRate, ORTSTractiveForceRampDownRate,
ORTSTractiveForceRampDownToZeroRate, ORTSDynamicBrakeForceRampUpRate,
ORTSDynamicBrakeForceRampDownRate and ORTSDynamicBrakeForceRampDownToZeroRate
in the .eng file. The value of each parameter determines the force increase/decrease
rate. To include ramp up/down times also for power, use the equivalent
ORTSTractivePowerRampUpRate, ORTSTractivePowerRampDownRate,
ORTSTractivePowerRampDownToZeroRate, ORTSDynamicBrakePowerRampUpRate,
ORTSDynamicBrakePowerRampDownRate and ORTSDynamicBrakePowerRampDownToZeroRate
parameters.
Example:
Engine (
ORTSTractiveForceRampUpRate ( 50kN/s )
ORTSTractiveForceRampDownRate ( 50kN/s )
ORTSTractiveForceRampDownToZeroRate ( 100kN/s )
ORTSDynamicBrakePowerRampUpRate ( 1000kW/s )
ORTSDynamicBrakeForceRampDownRate ( 50kN/s )
)
Another possibility to avoid sudden variations in tractive force while the driver
is moving the throttle, is to only update the throttle/brake demand when the lever
has not been moved for a defined amount of time. This can be implemented using the
ORTSDelayTimeBeforeUpdating, which has to be inserted for the desired
controller in the EngineControllers block.
Example:
Engine (
EngineControllers (
Throttle ( 0 1 0.1 0
NumNotches ( 0 )
ORTSDelayTimeBeforeUpdating ( 0.5s )
)
Brake_Dynamic ( 0 1 0.1 0
NumNotches ( 0 )
ORTSDelayTimeBeforeUpdating ( 1s )
)
)
)
8.2.3. Steam Locomotives
8.2.3.1. General Introduction to Steam Locomotives
8.2.3.1.1. Principles of Train Movement
Key Points to Remember:
Steam locomotive tractive effort must be greater than the train resistance forces.
Train resistance is impacted by the train itself, curves, gradients, tunnels, etc.
Tractive effort reduces with speed, and will reach a point where it equals the train resistance, and thus the train will not be able to go any faster.
This point will vary as the train resistance varies due to changing track conditions.
Theoretical tractive effort is determined by the boiler pressure, cylinder size, drive wheel diameters, and will vary between locomotives.
Low Factors of Adhesion will cause the locomotive’s driving wheels to slip.
8.2.3.1.2. Forces Impacting Train Movement
The steam locomotive is a heat engine which converts heat energy generated through the burning of fuel, such as coal, into heat and ultimately steam. The steam is then used to do work by injecting the steam into the cylinders to drive the wheels around and move the locomotive forward. To understand how a train will move forward, it is necessary to understand the principal mechanical forces acting on the train. The diagram below shows the two key forces affecting the ability of a train to move.
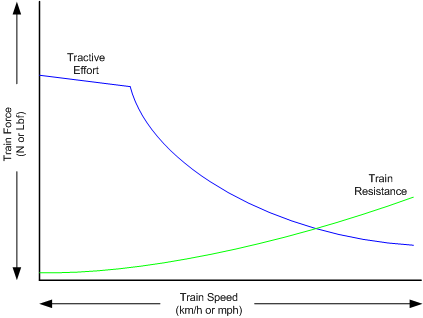
The first force is the tractive effort produced by the locomotive, whilst the second force is the resistance presented by the train. Whenever the tractive effort is greater than the train resistance the train will continue to move forward; once the resistance exceeds the tractive effort, then the train will start to slow down, and eventually will stop moving forward.
The sections below describe in more detail the forces of tractive effort and train resistance.
8.2.3.1.3. Train Resistance
The movement of the train is opposed by a number of different forces which are collectively grouped together to form the train resistance.
The main resistive forces are as follows (the first two values of resistance are modelled through the Davis formulas, and only apply on straight level track):
Journal or Bearing resistance (or friction)
Air resistance
Gradient resistance – trains travelling up hills will experience greater resistive forces then those operating on level track.
Curve resistance – applies when the train is traveling around a curve, and will be impacted by the curve radius, speed, and fixed wheel base of the rolling stock.
Tunnel resistance – applies when a train is travelling through a tunnel.
8.2.3.1.4. Tractive Effort
Tractive Effort is created by the action of the steam against the pistons, which, through the media of rods, crossheads, etc., cause the wheels to revolve and the engine to advance.
Tractive Effort is a function of mean effective pressure of the steam cylinder and is expressed by following formula for a simple locomotive. Geared and compound locomotives will have slightly different formula:
TE = Cyl/2 x (M.E.P. x d2 x s) / D
Where:
Cyl = number of cylinders
TE = Tractive Effort (lbf)
M.E.P. = mean effective pressure of cylinder (psi)
D = diameter of cylinder (in)
S = stroke of cylinder piston (in)
D = diameter of drive wheels (in)
8.2.3.1.5. Theoretical Tractive Effort
To allow the comparison of different locomotives, as well as determining their relative pulling ability, a theoretical approximate value of tractive effort is calculated using the boiler gauge pressure and includes a factor to reduce the value of M.E.P.
Thus our formula from above becomes:
TE = Cyl/2 x (C x BP x d2 x s) / D
Where:
BP = Boiler Pressure (gauge pressure - psi)
C = factor to account for losses in the engine, typically values between 0.7 and 0.85 were used by different manufacturers and railway companies. Default is set @ 0.85. User can change by adding the
ORTSTractiveEffortFactorparameter to the ENG file.
8.2.3.1.6. Factor of Adhesion
The factor of adhesion describes the likelihood of the locomotive slipping when force is applied to the wheels and rails, and is the ratio of the starting Tractive Effort to the weight on the driving wheels of the locomotive:
FoA = Wd / TE
Where:
FoA = Factor of Adhesion
TE = Tractive Effort (lbs)
Wd = Weight on Driving Wheels (lbs)
Typically the Factor of Adhesion should ideally be between 4.0 & 5.0 for steam locomotives. Values below this range will typically result in slippage on the rail.
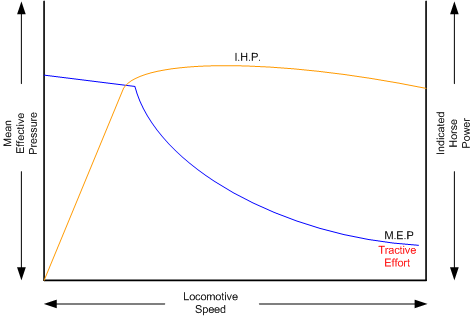
8.2.3.1.7. Indicated HorsePower (IHP)
Indicated Horsepower is the theoretical power produced by a steam locomotive. The generally accepted formula for Indicated Horsepower is:
I.H.P. = Cyl/2 x (M.E.P. x L x A x N) / 33000
Where:
IHP = Indicated Horsepower (hp)
Cyl = number of cylinders
M.E.P. = mean effective pressure of cylinder (psi)
L = stroke of cylinder piston (ft)
A = area of cylinder (sq in)
N = number of cylinder piston strokes per min (NB: two piston strokes for every wheel revolution)
As shown in the diagram below, IHP increases with speed, until it reaches a maximum value. This value is determined by the cylinder’s ability to maintain an efficient throughput of steam, as well as for the boiler’s ability to maintain sufficient steam generation to match the steam usage by the cylinders.
8.2.3.1.8. Hauling Capacity of Locomotives
Thus it can be seen that the hauling capacity is determined by the summation of the tractive effort and the train resistance.
Different locomotives were designed to produce different values of tractive effort, and therefore the loads that they were able to haul would be determined by the track conditions, principally the ruling gradient for the section, and the load or train weight. Therefore most railway companies and locomotive manufacturers developed load tables for the different locomotives depending upon their theoretical tractive efforts.
The table below is a sample showing the hauling capacity of an American (4-4-0) locomotive from the Baldwin Locomotive Company catalogue, listing the relative loads on level track and other grades as the cylinder size, drive wheel diameter, and weight of the locomotive is varied.
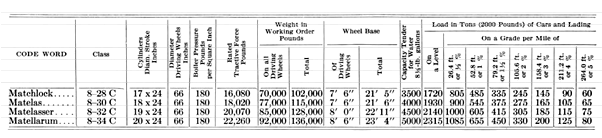
Typically the ruling gradient is defined as the maximum uphill grade facing a train in a particular section of the route, and this grade would typically determine the maximum permissible load that the train could haul in this section. The permissible load would vary depending upon the direction of travel of the train.
8.2.3.1.9. Elements of Steam Locomotive Operation
A steam locomotive is a very complex piece of machinery that has many component parts, each of which will influence the performance of the locomotive in different ways. Even at the peak of its development in the middle of the 20th century, the locomotive designer had at their disposal only a series of factors and simple formulae to describe its performance. Once designed and built, the performance of the locomotive was measured and adjusted by empirical means, i.e. by testing and experimentation on the locomotive. Even locomotives within the same class could exhibit differences in performance.
A simplified description of a steam locomotive is provided below to help understand some of the key basics of its operation.
As indicated above, the steam locomotive is a heat engine which converts fuel (coal, wood, oil, etc.) to heat; this is then used to do work by driving the pistons to turn the wheels. The operation of a steam locomotive can be thought of in terms of the following broadly defined components:
Boiler and Fire (Heat conversion)
Fuel Type
Cylinder (Work done)
8.2.3.1.10. Boiler and Fire (Heat conversion)
The amount of work that a locomotive can do will be determined by the amount of steam that can be produced (evaporated) by the boiler.
Boiler steam production is typically dependent upon the Grate Area, and the Boiler Evaporation Area.
Grate Area – the amount of heat energy released by the burning of the fuel is dependent upon the size of the grate area, draught of air flowing across the grate to support fuel combustion, fuel calorific value, and the amount of fuel that can be fed to the fire (a human fireman can only shovel so much coal in an hour). Some locomotives may have had good sized grate areas, but were ‘poor steamers’ because they had small draught capabilities.
Boiler Evaporation Area – consisted of the part of the firebox in contact with the boiler and the heat tubes running through the boiler. This area determined the amount of heat that could be transferred to the water in the boiler. As a rule of thumb a boiler could produce approximately 12-15 lbs/h of steam per ft2 of evaporation area (coal fired).
Boiler Superheater Area – Typically modern steam locomotives are superheated, whereas older locomotives used only saturated steam. Superheating is the process of putting more heat into the steam without changing the pressure. This provided more energy in the steam and allowed the locomotive to produce more work, but with a reduction in steam and fuel usage. In other words a superheated locomotive tended to be more efficient then a saturated locomotive.
8.2.3.1.11. Fuel Type
Different fuel types will produce different levels of heat. For example, Coal has a fuel calorific value of around 13,800 BTU/lb, whereas Wood may have values of between 3,000 and 7,000 BTU/lb (depending upon the condition of the wood fuel), and Oil (Diesel) may have a value up around 17,000 BTU/lb.
Hence the variations in fuel calorific value can dramatically impact the amount of steam that it is able to produce and ultimately the performance of the steam locomotive.
Hence Open Rails supports the use of different fuel types for steam locomotives, and these different fuel types can be configured with the following parameters.
ORTSSteamLocomotiveFuelType - indicates the type of fuel used by the locomotive -
currently Wood, Coal or Oil are available. Defaults to Coal.
ORTSMaxTenderWoodMass - amount of wood mass in tender (in ENG file)
ORTSTenderWagonWoodMass - amount of wood mass in tender (in tender WAG file - overwrites
the above value - non mandatory).
ORTSSteamLocomotiveFeedwaterSystemType - Older steam locomotives were fitted with
motion pumps to transfer water from the tender into the boiler. Steam injectors were
fitted to new locomotives from the 1860s. Currently MotionPump or Injector available.
Defaults to Injector.
FuelWood is used in any IntakePoint statements used, and route fuel points need to be set as wood type.
ORTSFuelOilHeatingRequired - some locomotives required the oil in the tender to be
steam heated, set to 1 (true) if this is the case. Defaults to false.
ORTSFuelOilSpecificGravity - specific gravity of the oil used as fuel on the locomotive.
ORTSMaxTenderFuelOilVolume - volume of oil carried in the tender, typically in gallons
or litres. (in ENG file)
ORTSTenderWagonFuelOilVolume - volume of oil carried in the tender, typically in gallons
or litres. (in tender WAG file - overwrites the above value - non mandatory).
FuelDiesel - is used in any IntakePoint statements, and route fuel points need to be set as diesel type.
8.2.3.1.12. Cylinder (Work done)
To drive the locomotive forward, steam was injected into the cylinder which pushed the piston backwards and forwards, and this in turn rotated the drive wheels of the locomotive. Typically the larger the drive wheels, the faster the locomotive was able to travel.
The faster the locomotive travelled the more steam that was needed to drive the cylinders. The steam able to be produced by the boiler was typically limited to a finite value depending upon the design of the boiler. In addition the ability to inject and exhaust steam from the cylinder also tended to reach finite limits as well. These factors typically combined to place limits on the power of a locomotive depending upon the design factors used.
8.2.3.1.13. Steam Locomotives with Multiple Engines
Some steam locomotives can have multiple steam engines (ie separate steam cylinders connected to different wheels), such as the 4-4-4-4 locomotive or an articulated Garratt locomotive.
To configure these types of locomotives configurations, multiple steam engines need to be added to the engine section of the ENG file. These should have the following format:
ORTSSteamEngines ( x
Steam (
..............
)
)
where x = number of steam engines fitted to locomotive.
The following parameters can be used to configure the steam engine:
``NumCylinders`` - number of steam cylinders in engine.
``CylinderStroke`` - stroke of steam cylinder.
``CylinderDiameter`` - diameter of steam cylinder.
``MaxIndicatedHorsepower`` - maximum indicated horsepower of steam engine.
``AttachedAxle`` - the axle wheelset that the steam engine is attached to.
``ExcessRodBalance`` - the weeight of the excess balance on the connecting rods
To specify the engine as a Booster engine, the following additional parameters can be used:
``BoosterCutoff`` - the cutoff point for the Booster steam cylinder.
``BoosterThrottleCutoff`` - the locomotive cutoff point where the Booster unlatches.
``BoosterGearRatio`` - the gear ratio of the Booster engine.
``AuxiliarySteamEngineType`` - the purpose of the steam engine can be defined by entering
one of Adhesion, Rack or Booster.
The following steam effects are defined for the 2nd multuple engine:
i) Steam Exhausts - these are the exhausts from the two steam cylinders, and would be
located wherever the steam exhausted out of the cylinders,
CylinderSteamExhaust2_1FX, CylinderSteamExhaust2_2FX, where “x_yFX”,
x = engine number and y = cylinder number.
ii) Cylinder Cocks Exhaust - the exhaust out of the cylinder drainage cocks,
Cylinders2_11FX, Cylinders2_12FX, Cylinders2_21FX, Cylinders2_22FX,
where “x_yzFX”, x = engine number, y = cylinder number and z = cylinder position.
The following steam effects are defined for the Booster Engine:
i) Steam Exhausts - these are the exhausts from the two steam cylinders, and would be
located wherever the steam exhausted out of the cylinders,
BoosterCylinderSteamExhaust01FX, BoosterCylinderSteamExhaust02FX
ii) Cylinder Cocks Exhaust - the exhaust out of the cylinder drainage cocks,
BoosterCylinders11FX, BoosterCylinders12FX, BoosterCylinders21FX,
BoosterCylinders22FX, where “xyFX”, x = cylinder number, and y = cylinder position.
- The following CAB controls have been defined,
STEAM_BOOSTER_AIR,STEAM_BOOSTER_IDLE, STEAM_BOOSTER_LATCH,STEAM_BOOSTER_PRESSURE.
8.2.3.1.14. Boiler Water and Water Gauge
The management of boiler water on a steam locomotive is important for maintaining steam productions as well as ensuring that water levels do not drop far enough to expose the firebox crown and the fusible plugs.
The Water Glass is the primary indication used by the fireman to manage boiler water levels, however as the locomotive goes up and down grades, the water level will appear to significantly change. The amount of variation will be determined by a number of factors, and principal amongst them are the following.
ORTSBoilerLength - length of the boiler (UoM distance)
ORTSWaterGaugeGlassHeight - length of the water gauge (UoM Distance)
ORTSBoilerDiameter - diameter of the boiler (UoM Distance)
ORTSBoilerCrownHeight - Height of boiler crown above centre line of the boiler (UoM Distance)
ORTSBoilerCrownCoverageHeight - Amount of water required to cover the crown (UoM Distance)
ORTSteamLocomotiveBoilerOrientation - indicates the boiler orientation, valid values are Horizontal,
CabForward, CabCentre, Vertical, Sloping. Default = Horizontal
ORTSBoilerAngle - Angle of boiler to horizontal, typically for Sloping boilers on steep inclines. (UoM Degree)
To display the changing water level with gradient in the Cab, use BOILER_WATER_GRADE in place of
BOILER_WATER in the CVF file. For example,
“Type ( BOILER_WATER_GRADE GAUGE )”
8.2.3.1.15. Steam Water Injectors
Water injectors are typically modelled by default, and sizes and injection rates will be calculated automatically by OR.
If desired the user may customise some of the default values by using the following parameters:
ORTSInjectorTypes ( x, y ) - will allow the user to set up a combination of exhaust or live steam injectors for the
locomotive. Use 0 = Live steam and 1 = Exhaust steam in either of the x or y positions. Note if ORTSInjectorTypes is not
present then InjectorTypes will be used if it is present in ENG file.
ORTSInjectorSize ( x, y ) - the size of each injector can be indicated in this parameter. The values will be in
mm, and typically should not be greater then 19mm. (UoM Distance)
8.2.3.1.16. Locomotive Back Pressure
OR calculates a default back pressure value for the exhaust steam emitted from the cylinder.
The user may customise the default value where appropriate values are known, ie from test reports, etc.
To customise the backpressure curve use:
ORTSCylinderBackPressureVsSteamOutput ( x, y ) - where x = series of cylinder steam usage rates in lb/h, and y = back
pressure in psig.
Note: The older parameter ortscylinderbackpressure is inaccurate and no longer supported in OR. An error message will
display if OR detects the use of this parameter.
To display the back pressure in the Cab, use BACK_PR.
Sound effects on the steam locomotive can be varied by using the volume control parameter BackPressureControlled.
8.2.3.1.17. Locomotive Types
During the course of their development, many different types of locomotives were developed, some of the more common categories are as follows:
Simple – simple locomotives had only a single expansion cycle in the cylinder
Compound – locomotives had multiple steam expansion cycles and typically had a high and low pressure cylinder.
Saturated – steam was heated to only just above the boiling point of water.
Superheated – steam was heated well above the boiling point of water, and therefore was able to generate more work in the locomotive.
Geared – locomotives were geared to increase the tractive effort produced by the locomotive, this however reduced the speed of operation of the locomotive.
8.2.3.1.18. Superheated Locomotives
In the early 1900s, superheaters were fitted to some locomotives. As the name was implied a superheater was designed to raise the steam temperature well above the normal saturated steam temperature. This had a number of benefits for locomotive engineers in that it eliminated condensation of the steam in the cylinder, thus reducing the amount of steam required to produce the same amount of work in the cylinders. This resulted in reduced water and coal consumption in the locomotive, and generally improved the efficiency of the locomotive.
Superheating was achieved by installing a superheater element that effectively increased the heating area of the locomotive.
8.2.3.1.19. Geared Locomotives
In industrial type railways, such as those used in the logging industry, spurs to coal mines were often built to very cheap standards. As a consequence, depending upon the terrain, they were often laid with sharp curves and steep gradients compared to normal main line standards.
Typical main line rod type locomotives couldn’t be used on these lines due to their long fixed wheelbase (coupled wheels) and their relatively low tractive effort was no match for the steep gradients. Thus geared locomotives found their niche in railway practice.
Geared locomotives typically used bogie wheelsets, which allowed the rigid wheelbase to be reduced compared to that of rod type locomotives, thus allowing the negotiation of tight curves. In addition the gearing allowed an increase of their tractive effort to handle the steeper gradients compared to main line tracks.
Whilst the gearing allowed more tractive effort to be produced, it also meant that the maximum piston speed was reached at a lower track speed.
As suggested above, the maximum track speed would depend upon loads and track conditions. As these types of lines were lightly laid, excessive speeds could result in derailments, etc.
The three principal types of geared locomotives used were:
Shay Locomotives
Climax
Heisler
8.2.3.2. Steam Locomotive Operation
To successfully drive a steam locomotive it is necessary to consider the performance of the following elements:
Boiler and Fire (Heat conversion )
Cylinder (Work done)
For more details on these elements, refer to the “Elements of Steam Locomotive Operation”
Summary of Driving Tips
Wherever possible, when running normally, have the regulator at 100%, and use the reverser to adjust steam usage and speed.
Avoid jerky movements when starting or running the locomotive, thus reducing the chances of breaking couplers.
When starting always have the reverser fully wound up, and open the regulator slowly and smoothly, without slipping the wheels.
8.2.3.2.1. Open Rails Steam Functionality (Fireman)
The Open Rails Steam locomotive functionality provides two operational options:
Automatic Fireman (Computer Controlled): In Automatic or Computer Controlled Fireman mode all locomotive firing and boiler management is done by Open Rails, leaving the player to concentrate on driving the locomotive. Only the basic controls such as the regulator and throttle are available to the player.
Manual Fireman: In Manual Fireman mode all locomotive firing and boiler management must be done by the player. All of the boiler management and firing controls, such as blower, injector, fuel rate, are available to the player, and can be adjusted accordingly.
Use the keys <Crtl+F> to switch between Manual and Automatic firing
modes.
A full listing of the keyboard controls for use when in manual mode is provided on the Keyboard tab of the Open Rails Options panel.
8.2.3.3. Boiler Management
In Open Rails, the safe operating range for the boiler water level is 75-90% and this is maintained automatically by the AI Fireman. (Note: this is not the reading of the boiler water glass gauge but the %age full of the boiler.)
In manual mode, you must keep the boiler water level below 90%. A level of 91% or more drags water into the steam pipes and, being incompressible, the water will damage the cylinders. Open Rails does not model the damage but issues confirmation messages: “Boiler overfull and priming” and “Boiler no longer priming” on rising to 91% and falling below 90%
In manual mode, you must keep the boiler water level above 70%. A level below 70% uncovers the firebox crown. In real life, this is a catastrophic failure which melts the fusible plugs in the crown and that releases steam into the firebox and from there onto the footplate.
Open Rails does not model the steam release but drops the boiler pressure and the fire and issues a confirmation message: “Water level dropped too far. Plug has fused and loco has failed.” Basically the loco is coasting thereafter and nothing can be done to recover.
8.2.3.3.1. Hot or Cold Start
The locomotive can be started either in a hot or cold mode. Hot mode simulates a locomotive which has a full head of steam and is ready for duty.
Cold mode simulates a locomotive that has only just had the fire raised, and still needs to build up to full boiler pressure, before having full power available.
This function can be selected through the Open Rails options menu on the Simulation tab.
8.2.3.3.2. Main Steam Locomotive Controls
This section will describe the control and management of the steam locomotive based upon the assumption that the Automatic fireman is engaged. The following controls are those typically used by the driver in this mode of operation:
Cylinder Cocks – allows water condensation to be exhausted from the cylinders. (Open Rails Keys: toggle
<C>)Regulator – controls the pressure of the steam injected into the cylinders. (Open Rails Keys:
<D>= increase,<A>= decrease)Reverser – controls the valve gear and when the steam is “cutoff”. Typically it is expressed as a fraction of the cylinder stroke. (Open Rails Keys:
<W>= increase,<S>= decrease). Continued operation of the W or S key will eventually reverse the direction of travel for the locomotive.Brake – controls the operation of the brakes. (Open Rails Keys:
<'>= increase,<;>= decrease)
8.2.3.3.3. Recommended Option Settings
For added realism of the performance of the steam locomotive, it is suggested that the following settings be considered for selection in the Open Rails options menu:
Break couplers
Curve speed dependent
Curve resistance speed
Hot start
Tunnel resistance dependent
NB: Refer to the relevant sections of the manual for more detailed description of these functions.
8.2.3.3.4. Locomotive Starting
Open the cylinder cocks. They are to remain open until the engine has traversed a distance of about an average train length, consistent with safety.
The locomotive should always be started in full gear (reverser up as high as possible), according to the direction of travel, and kept there for the first few turns of the driving wheels, before adjusting the reverser.
After ensuring that all brakes are released, open the regulator sufficiently to move the train, care should be exercised to prevent slipping; do not open the regulator too much before the locomotive has gathered speed. Severe slipping causes excessive wear and tear on the locomotive, disturbance of the fire bed and blanketing of the spark arrestor. If slipping does occur, the regulator should be closed as appropriate, and if necessary sand applied.
Also, when starting, a slow even increase of power will allow the couplers all along the train to be gradually extended, and therefore reduce the risk of coupler breakages.
8.2.3.3.5. Locomotive Running
Theoretically, when running, the regulator should always be fully open and the speed of the locomotive controlled, as desired, by the reverser. For economical use of steam, it is also desirable to operate at the lowest cut-off values as possible, so the reverser should be operated at low values, especially running at high speeds.
When running a steam locomotive keep an eye on the following key
parameters in the Heads up Display (HUD – <F5>) as they will give the driver
an indication of the current status and performance of the locomotive with
regard to the heat conversion (Boiler and Fire) and work done (Cylinder)
processes. Also bear in mind the above driving tips.
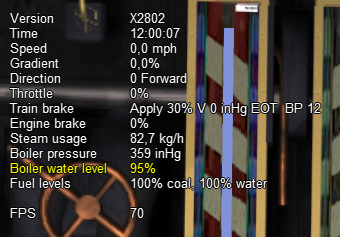
Direction – indicates the setting on the reverser and the direction of travel. The value is in per cent, so for example a value of 50 indicates that the cylinder is cutting off at 0.5 of the stroke.
Throttle – indicates the setting of the regulator in per cent.
Steam usage – these values represent the current steam usage per hour.
Boiler Pressure – this should be maintained close to the maximum working pressure of the locomotive.
Boiler water level – indicates the level of water in the boiler. Under operation in Automatic Fireman mode, the fireman should manage this.
Fuel levels – indicate the coal and water levels of the locomotive.
For information on the other parameters, such as the brakes, refer to the relevant sections in the manual.
For the driver of the locomotive the first two steam parameters are the key ones to focus on, as operating the locomotive for extended periods of time with steam usage in excess of the steam generation value will result in declining boiler pressure. If this is allowed to continue the locomotive will ultimately lose boiler pressure, and will no longer be able to continue to pull its load.
Steam usage will increase with the speed of the locomotive, so the driver will need to adjust the regulator, reverser, and speed of the locomotive to ensure that optimal steam pressure is maintained. However, a point will finally be reached where the locomotive cannot go any faster without the steam usage exceeding the steam generation. This point determines the maximum speed of the locomotive and will vary depending upon load and track conditions
The AI Fireman in Open Rails is not proactive, ie it cannot look ahead for gradients, etc, and therefore will only add fuel to the fire once the train is on the gradient. This reactive approach can result in a boiler pressure drop whilst the fire is building up. Similarly if the steam usage is dropped (due to a throttle decrease, such as approaching a station) then the fire takes time to reduce in heat, thus the boiler pressure can become excessive.
When the AI Fireman is operating in this simplistic manner, excess pressure is bled off silently and the safety valve operation is suppressed.
To give the player a little bit more control over this, and to facilitate the maintaining of the boiler pressure the following key controls have been added to the AI Fireman function:
AIFireOn - (<Alt+H>) - Forces the AI fireman to start building
the fire up (increases boiler heat & pressure, etc) - typically used just
before leaving a station to maintain pressure as steam consumption increases.
This function will be turned off if AIFireOff, AIFireReset are triggered or
if boiler pressure or BoilerHeat exceeds the boiler limit.
AIFireOff - (<Ctrl+H>) - Forces the AI fireman to stop adding
to the fire (allows boiler heat to decrease as fire drops) - typically used
approaching a station to allow the fire heat to decrease, and thus stopping
boiler pressure from exceeding the maximum. This function will be turned off
if AIFireOn, AIFireReset are triggered or if boiler pressure or BoilerHeat
drops too low.
Once AIFireOn or AIFireOff have been used, the safety valves work normally as for manual firing until they are reset back to the same operation by the pressure dropping to a low enough level.
AIFireReset - (<Ctrl+Alt+H>) - turns off both of the above
functions when desired.
If these controls are not used, then the AI fireman operates in the same fashion as previously.
8.2.3.3.6. Steam Boiler Heat Radiation Loss
A certain amount of heat is lost from the boiler of a steam locomotive. An uninsulated boiler could lose a lot of heat and this impacts on the performance of the locomotive, hence boilers were insulated to reduce the heat losses.
The amount of heat lost will be dependent upon the exposed surface area of the boiler, the difference in temperature between the boiler and the ambient temperature. The amount of heat lost will also increase as the speed of the locomotive increases.
OR models the heat loss from a boiler with some standard default settings, however the model can be customised to suit the locomotive by adjusting the following settings.
ORTSBoilerSurfaceArea- Surface area of the boiler / fire box that impacts heat loss. Default UoM - (ft2)ORTSFractionBoilerInsulated- Fraction of boiler surface area covered by insulation (less then 1)ORTSHeatCoefficientInsulation- Thermal conduction coefficient. Default UoM - (BTU / (ft2 / hr.) / (1 (in. / F))
8.2.3.3.7. Steam Boiler Blowdown
Over time as steam is evaporated from the boiler a concentration of impurities will build up in the boiler. The boiler blowdown valve was used to remove these sediments from the boiler which could impact its efficiency. Depending upon the quality of the feed water used in the boiler, blowdown could be needed regularly when the locomotive was in operation.
The blowdown valve can be operated by toggling the <Shft+C> keys onn and off.
Alternatively a cab control can be set up by using the <ORTS_BLOWDOWN_VALVE ( x, y, z )>.
A special steam effect can also be added. See the section on steam effects.
8.2.3.3.8. Steam Locomotive Carriage Steam Heat Modelling
8.2.3.3.9. Overview
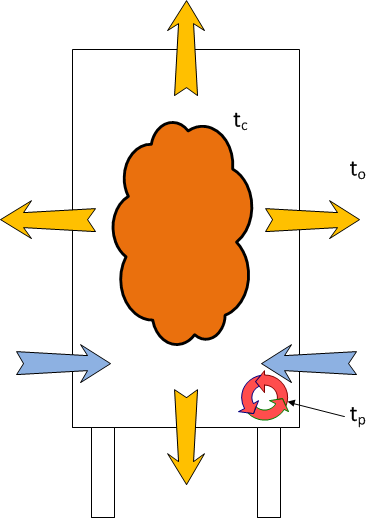
In the early days of steam, passenger carriages were heated by fire burnt in stoves within the carriage, but this type of heating proved to be dangerous, as on a number of occasions the carriages actually caught fire and burnt.
A number of alternative heating systems were adopted as a safer replacement.
The Open Rails Model is based upon a direct steam model, ie one that has steam pipes installed in each carriage, and pumps steam into each car to raise the internal temperature in each car.
The heat model in each car is represented by Figure 1 below. The key parameters influencing the operation of the model are the values of tc, to, tp, which represent the temperature within the carriage, ambient temperature outside the carriage, and the temperature of the steam pipe due to steam passing through it.
As shown in the figure the heat model has a number of different elements as follows:
Heat Model for Passenger Car
Internal heat mass – the air mass in the carriage (represented by cloud) is heated to temperature that is comfortable to the passengers. The energy required to maintain the temperature will be determined the volume of the air in the carriage.
Heat Loss – Transmission – over time heat will be lost through the walls, roof, and floors of the carriage (represented by outgoing orange arrows), this heat loss will reduce the temperature of the internal air mass.
Heat Loss – Infiltration – also over time as carriage doors are opened and closed at station stops, some cooler air will enter the carriage (represented by ingoing blue arrows), and reduce the temperature of the internal air mass.
Steam Heating – to offset the above heat losses, steam was piped through each of the carriages (represented by circular red arrows). Depending upon the heat input from the steam pipe, the temperature would be balanced by offsetting the steam heating against the heat losses.
8.2.3.3.10. Carriage Heating Implementation in Open Rails
Steam heating can be set up on steam locomotives, or on diesels with steam heating boilers, or alternatively with special cars that had steam heating boilers installed in them.
To enable steam heating to work in Open Rails the following parameter must be included in the engine section of the steam locomotive ENG File:
MaxSteamHeatingPressure( x )
Where: x = maximum steam pressure in the heating pipe – should not exceed 100 psi
If the above parameter is added to the locomotive, then an extra line will appear in the extended HUD to show the temperature in the train, and the steam heating pipe pressure, etc.
Steam heating will only work if there are passenger cars attached to the locomotive, or cars that have been set as requiring heating.
Warning messages will be displayed if the temperature inside the carriage drops below the temperature limits.
The player can control the train temperature by using the following controls:
<Alt+U>– increase steam pipe pressure (and hence train temperature)<Alt+D>– decrease steam pipe pressure (and hence train temperature)
The steam heating control valve can be configured by adding an engine controller
called ORTSSteamHeat ( w, x, y, z). It should be configured as a standard
4 value controller.
The primary purpose of this model is to calculate steam usage for the heating, and in the case of a steam locomotive this will reduce available steam for the locomotive to use. Water and fuel usage in producing the heat will also result in the mass of the locomotive or steam heating van to be reduced.
It should be noted that the impact of steam heating will vary depending upon the season, length of train, etc.
A set of standard default parameters are included in Open Rails which will allow steam heating to work once the above changes have been implemented.
For those who would like to customise the steam heating the following parameters which can be inserted in the wagon file section can be adjusted as follows.
The passenger (or other heated cars) can be adjusted with the following parameters:
ORTSHeatingWindowDeratingFactor- is the fraction of the car side that is occupied by windows.ORTSHeatingCompartmentTemperatureSet- is the temperature that the car thermostat is set to.ORTSHeatingCompartmentPipeAreaFactor- is a factor that adjusts the heating area of the steam heater in the passenger compartment.ORTSHeatingTrainPipeOuterDiameter- outer diameter of the main steam pipe that runs the length of the train.ORTSHeatingTrainPipeInnerDiameter- inner diameter of the main steam pipe that runs the length of the train.ORTSHeatingConnectingHoseOuterDiameter- outer diameter of the connecting hose between carriages.ORTSHeatingConnectingHoseInnerDiameter- inner diameter of the connecting hose between carriages.
For diesel locomotives or steam heating boiler vans the following parameters can be used to set the parameters of the steam heating boiler:
ORTSWagonSpecialType- can be used to indicate whether the car is a boiler van (set = HeatingBoiler), or if the car is heated (set = Heated).ORTSHeatingBoilerWaterUsage- is the water usage for the steam heating boiler, and is a table with a series of x and y parameters, where x = steam usage (lb/hr) and y = water usage (g-uk/hr).ORTSHeatingBoilerFuelUsage- is the fuel usage for the steam heating boiler, and is a table with a series of x and y parameters, where x = steam usage (lb/hr) and y = fuel usage (g-uk/hr).ORTSHeatingBoilerWaterTankCapacity- is the feed water tank capacity for the steam boiler.ORTSHeatingBoilerFuelTankCapacity- is the fuel tank capacity for the steam boiler. Applies to steam heating boiler cars only.
Special effects can also be added to support the steam heating model, see the section Special Visual Effects for Locomotives or Wagons for more information.
8.2.3.4. Steam Locomotives – Physics Parameters for Optimal Operation
8.2.3.4.1. Required Input ENG and WAG File Parameters
The OR Steam Locomotive Model (SLM) should work with default MSTS files; however optimal performance will only be achieved if the following settings are applied within the ENG file. The following list only describes the parameters associated with the SLM, other parameters such as brakes, lights, etc. still need to be included in the file. As always, make sure that you keep a backup of the original MSTS file.
Open Rails has been designed to do most of the calculations for the modeler, and typically only the key parameters are required to be included in the ENG or WAG file. The parameters shown in the Locomotive performance Adjustments section should be included only where a specific performance outcome is required, since default parameters should provide a satisfactory result.
When creating and adjusting ENG or WAG files, a series of tests should be undertaken to ensure that the performance matches the actual real-world locomotive as closely as possible. For further information on testing, as well as some suggested test tools, go to this site.
NB: These parameters are subject to change as Open Rails continues to develop.
Notes:
New – parameter names starting with ORTS means added as part of OpenRails development
Existing – parameter names not starting with ORTS are original in MSTS or added through MSTS BIN
Possible Locomotive Reference Info:
Parameter |
Description |
Recommended Units |
Typical Examples |
|---|---|---|---|
General Information (Engine section) |
|||
ORTSSteamLocomotiveType ( x ) |
Describes the type of locomotive |
Simple, Compound, Geared |
(Simple)
(Compound)
(Geared)
|
WheelRadius ( x ) |
Radius of drive wheels |
Distance |
(0.648m)
(36in)
|
MaxSteamHeatingPressure ( x ) |
Max pressure in steam heating system for passenger carriages |
Pressure, NB: normally < 100 psi |
(80psi) |
Boiler Parameters (Engine section) |
|||
ORTSSteamBoilerType ( x ) |
Describes the type of boiler |
Saturated, Superheated |
(Saturated)
(Superheated)
|
BoilerVolume ( x ) |
Volume of boiler. This parameter is not overly critical. |
Volume, where an act. value is n/a, use approx. EvapArea / 8.3 |
(“220*(ft^3)”) (“110*(m^3)”) |
ORTSEvaporationArea ( x ) |
Boiler evaporation area |
Area |
(“2198*(ft^2)”) (“194*(m^2)”) |
MaxBoilerPressure ( x ) |
Max boiler working pressure (gauge) |
Pressure |
(200psi)
(200kPa)
|
ORTSSuperheatArea ( x ) |
Superheating heating area |
Area |
(“2198*(ft^2)”) (“194*(m^2)” ) |
Locomotive Tender Info (Wagon section - will override Engine section values) |
|||
ORTSTenderWagonWaterMass ( x ) |
Water in tender |
Mass |
(36500lb)
(16000kg)
|
ORTSTenderWagonCoalMass ( x ) |
Coal in tender |
Mass |
(13440lb)
(6000kg)
|
Locomotive Tender Info (Engine section) |
|||
MaxTenderWaterMass ( x ) |
Water in tender |
Mass |
(36500lb)
(16000kg)
|
MaxTenderCoalMass ( x ) |
Coal in tender |
Mass |
(13440lb)
(6000kg)
|
IsTenderRequired ( x ) |
Locomotive Requires a tender |
0 = No, 1 = Yes |
(0)
(1)
|
Fire (Engine section) |
|||
ORTSGrateArea ( x ) |
Locomotive fire grate area |
Area |
(“2198*(ft^2)”) (“194*(m^2)”) |
ORTSFuelCalorific ( x ) |
Calorific value of fuel |
For coal use 13700 btu/lb |
(13700btu/lb) (33400kj/kg) |
ORTSSteamFiremanMaxPossibleFiringRate ( x ) |
Maximum fuel rate that fireman can shovel in an hour. (Mass Flow) |
Use as def: UK:3000lb/h US:5000lb/h AU:4200lb/h |
(4200lb/h) (2000kg/h) |
SteamFiremanIsMechanicalStoker ( x ) |
Mechanical stoker = large rate of coal feed |
Boolean, 0=no-stoker 1=stoker |
( 1 ) |
Steam Cylinder (Engine section) |
|||
NumCylinders ( x ) |
Number of steam cylinders |
Boolean |
( 2 ) |
CylinderStroke ( x ) |
Length of cylinder stroke |
Distance |
(26in)
(0.8m)
|
CylinderDiameter ( x ) |
Cylinder diameter |
Distance |
(21in)
(0.6m)
|
LPNumCylinders ( x ) |
Number of steam LP cylinders (compound locomotive only) |
Boolean |
( 2 ) |
LPCylinderStroke ( x ) |
LP cylinder stroke length (compound locomotive only) |
Distance |
(26in)
(0.8m)
|
LPCylinderDiameter ( x ) |
Diameter of LP cylinder (compound locomotive only) |
Distance |
(21in)
(0.6m)
|
Friction (Wagon section) |
|||
ORTSDavis_A ( x ) |
Journal or roller bearing + mechanical friction |
N, lbf. Use FCalc to calculate |
(502.8N)
(502.8lb)
|
ORTSDavis_B ( x ) |
Flange friction |
Nm/s, lbf/mph. Use FCalc |
(1.5465Nm/s) (1.5465lbf/mph) |
ORTSDavis_C ( x ) |
Air resistance friction |
Nm/s^2, lbf/mph^2 Use FCalc |
(1.43Nm/s^2) (1.43lbf/mph^2) |
ORTSBearingType ( x ) |
Bearing type used to determine rolling resistance |
Grease,
Friction,
Roller
Low
|
( Roller ) |
Friction (Engine section) |
|||
ORTSDriveWheelWeight ( x ) |
Total weight on the locomotive driving wheels |
Mass, Leave out if unknown |
(2.12t) |
Curve Speed Limit (Wagon section) |
|||
ORTSUnbalancedSuperElevation ( x ) |
Determines the amount of Cant Deficiency applied to carriage |
Distance, Leave out if unknown |
(3in) (0.075m) |
ORTSTrackGauge ( x ) |
Track gauge |
Distance, Leave out if unknown |
(4ft 8.5in)
( 1.435m )
( 4.708ft)
|
CentreOfGravity ( x, y, z ) |
Defines the centre of gravity of a locomotive or wagon |
Distance, Leave out if unknown |
(0m, 1.8m, 0m)
(0ft, 5.0ft, 0ft)
|
Curve Friction (Wagon section) |
|||
ORTSRigidWheelBase ( x ) |
Rigid wheel base of vehicle |
Distance, Leave out if unknown |
(5ft 6in)
(3.37m)
|
Locomotive Gearing (Engine section – Only required if locomotive is geared) |
|||
ORTSSteamGearRatio ( a, b ) |
Ratio of gears |
Numeric |
(2.55, 0.0) |
ORTSSteamMaxGearPistonRate ( x ) |
Max speed of piston |
ft/min |
( 650 ) |
ORTSSteamGearType ( x ) |
Fixed gearing or selectable gearing |
Fixed, Select |
(Fixed)
(Select)
|
ORTSGearedTractiveEffortFactor ( x ) |
|
Fixed |
(Fixed)
|
Locomotive Performance Adjustments (Engine section – Optional, for experienced modellers) |
|||
ORTSBoilerEvaporationRate ( x ) |
Multipl. factor for adjusting maximum boiler steam output |
Be tween 10–15, Leave out if not used |
(15.0) |
ORTSBurnRate ( x, y ) |
Tabular input: Coal combusted (y) to steam generated (x) |
x – lbs, y – kg, series of x & y values. Leave out if unused |
|
ORTSCylinderEfficiencyRate ( x ) |
Multipl. factor for steam cylinder (force) output |
Un limited, Leave out if unused |
(1.0) |
ORTSBoilerEfficiency (x, y) |
Tabular input: boiler efficiency (y) to coal combustion (x) |
x – lbs/ft2/h, series of x & y values. Leave out if unused |
|
ORTSCylinderPortOpening ( x ) |
Size of cylinder port opening |
Between 0.05–0.12, Leave out if unused |
(0.085) |
ORTSCylinderInitialPressureDrop ( x, y ) |
Tabular input: wheel speed (x) to pressure drop factor (y) |
x – rpm, series of x & y values. Leave out if unused |
|
ORTSCylinderBackPressure ( x, y ) |
Tabular input: Loco indicated power (x) to backpressure (y) |
x – hp, y – psi(g), series of x & y values. Leave out if unused |
|
8.2.3.5. Special Visual Effects for Locomotives or Wagons
Steam exhausts on a steam locomotive, and other special visual effects can be modelled in OR by defining
appropriate visual effects in the SteamSpecialEffects section of the steam locomotive ENG file, the
DieselSpecialEffects section of the diesel locomotive ENG file, or the SpecialEffects section
of a relevant wagon (including diesel, steam or electric locomotives.
OR supports the following special visual effects in a steam locomotive:
Steam cylinder cocks (named
Cylinders11FX,Cylinders12FX,Cylinders21FX,Cylinders22FX,Cylinders31FX,Cylinders32FX,Cylinders41FX,Cylinders42FX) – these effects are provided which will represent the steam exhausted when the steam cylinder cocks are opened. The effects are provided to represent the steam exhausted at the front and rear of each piston stroke. The numbers in the value names represent firstly the cylinder and the second the cylinder position, ie “11” = cylinder 1, front stroke, “12” = cylinder 1, backward stroke. These effects will appear whenever the cylinder cocks are opened, and there is sufficient steam pressure at the cylinder to cause the steam to exhaust, typically when the regulator is open (> 0%). Note:CylindersFXandCylinders2FXshould now be considered legacy parameters and ideally should not be used.Cylinder Exhaust (named
CylinderSteamExhaust1FX,CylinderSteamExhaust2FX,CylinderSteamExhaust3FX,CylinderSteamExhaust4FX) – these effects represent the steam exhausted from the cylinders at the end of each stroke. Typically this steam is feed back through a blast pipe up the smoke stack to improve draught in the firebox and bolier. The above parameters represent up to 4 individual steam cylinders.Stack (named
StackFX) – represents the smoke stack emissions. This effect will appear all the time in different forms depending upon the firing and steaming conditions of the locomotive.Compressor (named
CompressorFX) – represents a steam leak from the air compressor. Will only appear when the compressor is operating.Generator (named
GeneratorFX) – represents the emission from the turbo-generator of the locomotive. This effect operates continually. If a turbo-generator is not fitted to the locomotive it is recommended that this effect is left out of the effects section which will ensure that it is not displayed in OR.Safety valves (named
SafetyValvesFX, SafetyValves2FX, SafetyValves3FX, SafetyValves4FX)
– represents the discharge of the steam valves if the maximum boiler pressure is exceeded.
They will appear whenever the relevant safety valve operates.
- Whistle (named WhistleFX) – represents the steam discharge from the
whistle.
Injectors (named
Injectors1FXandInjectors2FX) – represents the steam discharge from the steam overflow pipe of the injectors. They will appear whenever the respective injectors operate.Ejectors (named
SmallEjectorFXandLargeEjectorFX) – represents the steam discharge from the steam ejectors associated with vacuum braking. They will appear whenever the respective ejectors operate.Boiler blowdown valves (named
BlowdownFX) – represents the discharge of the steam boiler blowdown valve. It will appear whenever the blowdown valve operates.
OR supports the following special visual effects in a diesel locomotive:
Exhaust (named
Exhaustnumber) – is a diesel exhaust. Multiple exhausts can be defined, simply by adjusting the numerical value of the number after the key word exhaust.
OR supports the following special visual effects in a wagon (also the wagon section of an ENG file):
Steam Heating Boiler (named
HeatingSteamBoilerFX) – represents the exhaust for a steam heating boiler. Typically this will be set up on a diesel or electric train as steam heating was provided directly from a steam locomotive.Wagon Generator (named
WagonGeneratorFX) – represents the exhaust for a generator. This generator was used to provide additional auxiliary power for the train, and could have been used for air conditioning, heating lighting, etc.Wagon Smoke (named
WagonSmokeFX) – represents the smoke coming from say a wood fire. This might have been a heating unit located in the guards van of the train.Heating Hose (named
HeatingHoseFX) – represents the steam escaping from a steam pipe connection between wagons.Heating Compartment Steam Trap (named
HeatingCompartmentSteamTrapFX) – represents the steam escaping from the steam trap under a passenger compartment.Heating Main Pipe Steam Trap (named
HeatingMainPipeSteamTrapFX) – represents the steam escaping from a steam trap in the main steam pipe running under the passenger car.
NB: If a steam effect is not defined in the SteamSpecialEffects, DieselSpecialEffects, or the
SpecialEffects section of an ENG/WAG file, then it will not be displayed in the simulation.
Similarly if any of the co-ordinates are zero, then the effect will not be displayed.
Each effect is defined by inserting a code block into the ENG/WAG file similar to the one shown below:
Cylinders11FX (
-1.0485 1.0 2.8
-1 0 0
0.1
)
The code block consists of the following elements:
Effect name – as described above,
Effect location on the locomotive (given as an x, y, z offset in metres from the origin of the wagon shape)
Effect direction of emission (given as a normal x, y and z)
Effect nozzle width (in metres)
8.2.3.6. Auxiliary Water Tenders
To increase the water carrying capacity of a steam locomotive, an auxiliary tender (or as known in Australia as a water gin) would sometimes be coupled to the locomotive. This auxiliary tender would provide additional water to the locomotive tender via connecting pipes.
Typically, if the connecting pipes were opened between the locomotive tender and the auxiliary tender, the water level in the two vehicles would equalise at the same height.
To implement this feature in Open Rails, a suitable water carrying vehicle needs to have the following parameter included in the WAG file.
ORTSAuxTenderWaterMass ( 70000lb ) The units of measure are in mass.
When the auxiliary tender is coupled to the locomotive the tender line in the LOCOMOTIVE INFORMATION HUD will show the two tenders and the water capacity of each. Water (C) is the combined water capacity of the two tenders, whilst Water (T) shows the water capacity of the locomotive tender, and Water (A) the capacity of the auxiliary tender (as shown below).
To allow the auxiliary tender to be filled at a water fuelling point, a water freight animation will be need to be added to the WAG file as well. (Refer to Freight Animations for more details).
8.2.4. Unpowered Control Car
This module simulates the control cab of a MU set of cars. The cab typically would be located in an unpowered trailer car which is attached to a powered car for the provision of its motive force to drive the train forward.
Apart from producing motive force the car (and cabin controls) should behave exactly the same as a locomotive.
To set a control car up it is necessary to produce an ENG file which has the Type ( Control ) parameter set in
the engine section of the ENG file.
The Control car uses most of the same parameters for its configuration as a powered locomotive. The major items that can be left out are those parameters associated with power, motive force, diesel engines, some braking items, such as the compressor and main air reservoir, and some of the diesel effects (as it has no diesel engine).
Some of the cab monitoring gauges provide visibility of what is happening on the powered car. To do this OR searches for the “closest” powered car near the Control car and uses its information.
If the Control Car is “linked” with a geared power car then it will be necessary for the control car to have a gear box
controller. To get OR to set it up, it will be necessary for the GearBoxControllerNumberofGears ( x ), where x = number
of gears in the associated power car, to be added to the engine section of the ENG file.
8.3. Multiple Units of Locomotives in Same Consist
In an OR player train one locomotive is controlled by the player, while the other units are controlled by default by the train’s MU (multiple unit) signals for braking and throttle position, etc. The player-controlled locomotive generates the MU signals which are passed along to every unit in the train.
8.3.1. Distributed Power
This is applicable only to trains hauled by diesel locomotives equipped with dynamic brakes.
More locomotive groups may be present in American long freight trains; a locomotive group is defined as a set of locomotives that have no wagons in between. Groups different from the group including the lead locomotive are called remote groups.
Remote groups can be controlled in two modes: synchronous or asynchronous. Locomotives in the player train can be arranged to be part of one of the two above control groups. So each locomotive group (except the lead one, which always belongs to the sync control group) can be either part the sync or of the async control group. However, if a locomotive group is part of the async control group, all locomotive groups behind it must also be part of the async control group.
The arrangement can be changed during run, which in real life is performed by using the locomotive’s onboard computer (e.g. Locotrol).
This functionality is necessary in American long-train freight operations. An example use case is when a train finished climbing a mountain pass. At this point the lead locomotives have to start dynamic braking driving downhill, while the trailing units still need to keep pushing the train’s end uphill. The locomotive driver has the possibility to build the fence, i.e. move the last locomotive group to the async control group.
While locomotives in sync control group always copy the traction and dynamic brake settings of the lead (man-controlled) locomotive, for locomotives in async control group these can be adjusted independently. Other controls, like reverser and air brake are always synchronized throughout the whole train, and changing reverser setting or applying air brakes will force async controlled locomotives to fall back to idle.
The fence between sync and async control groups can be moved back and forth along the train. This is useful when there are one or more middle-train locomotive groups in the consist. However it is not possible to move the fence to separate two directly interconnected locomotives: such locomotives can be rearranged only together.
If the driver dismantles the fence, by moving it after the last locomotive group, all locomotive groups are moved back to sync control group, and therefore all locomotives will work in sync with the leading one. All-sync operation is also the default, when the game starts.
Traction and dynamic brake settings for sync group can be controlled by the
usual keys: <A> and <D>. The following additional controls are
available for controlling the async group settings:
Move To Back –
<Ctrl+Shift+O>: Move one locomotive group to back (async) control group (fence is moved towards the front of the train).Move To Front –
<Ctrl+O>: Move one locomotive group to front (sync) control group (fence is moved towards the back of the train).Traction –
<Ctrl+L>: Switch async group to traction mode.Idle –
<Ctrl+Shift+L>: Switch async group to idle state.Brake –
<Ctrl+'> (key two positions at the right of L): Switch async group to dynamic braking mode.More –
<Ctrl+U>: Increase async group traction or dynamic brake by a notch, depending on its mode setting.Less –
<Ctrl+Shift+U>: Decrease async group traction or dynamic brake by a notch, depending on its mode setting.
HUD shows the sync–async configuration in line Multiple Units on main page. When it reads e.g. “2–2 | 1”, then it means that front and middle-train double-unit locomotives are controlled in sync with the leading unit, while the trailing pushing unit is controlled async independently. The actual set value of traction or dynamic brake of async group is shown in lines Throttle and Dynamic Brake, respectively, in brackets, e.g.: Throttle: 0% (50%).
In addition to applying power and dynamic brake, remote units can also manage the train brake, independent brake, and emergency brake in sync with the lead locomotive. This can dramatically speed up brake application and release on long trains, which has allowed trains to increase in length substantially without major decreases in brake performance. Only one locomotive in each group, the ‘lead’ DP unit, will have brakes cut-in. Usually this is the same locomotive recieving throttle data from the lead locomotive. In Open Rails, these locomotives are designated automatically. To determine which units are the ‘lead’ in each group, check the ID row on the DPU Info window.
As described earlier, operation in sync mode or async mode has no effect on air brake behavior. In reality, additional remote modes such as set-out, bv out, and isolate would disable air brakes on remote units, but these modes are not present for simplicity.
By default, Open Rails will treat remote groups as manned helpers who typically
would not assist in train brake operations. To enable brake synchronization,
the token engine(ORTSDPBrakeSynchronization( should be used.
The valid settings for ORTSDPBrakeSynchronization are as follows:
"Apply": DP units will reduce the brake pipe pressure locally to match the equalizing reservoir pressure of the controlling locomotive. (The controlling locomotive must also have the"Apply"setting.)"Release": DP units will increase the brake pipe pressure locally to match the equalizing reservoir pressure of the controlling locomotive. (The controlling locomotive must also have the"Release"setting.)"Emergency": DP units will vent the brake pipe to 0 if an emergency application is triggered by the controlling locomotive. (The controlling locomotive must also have the"Emergency"setting.)"Independent": DP units will match the brake cylinder pressure of the controlling locomotive, and will automatically bail-off automatic brake applications if needed. (The controlling locomotive must also have the"Independent"setting.)
All settings can be combined as needed, simply place a comma between each setting
in the string: ORTSDPBrakeSynchronization("Apply, Release, Emergency, Independent")
will simulate the configuration of most modern locomotives. Unlike other distributed power
features, brake synchronization can be applied to any locomotive type to simulate a wide
variety of braking systems.
Distributed power info and commands can also be displayed and operated through cabview controls, as explained here
The complete distributed power configuration is displayed in the
Distributed Power Info extended HUD page, where the state of all locomotives
in the train are shown, as well as in the Train DPU Info window, which is
displayed after pressing <Shift+F9>, and which shows only the state of the first
locomotive of each locomotive group, as occurs also in displays of real
locomotives.
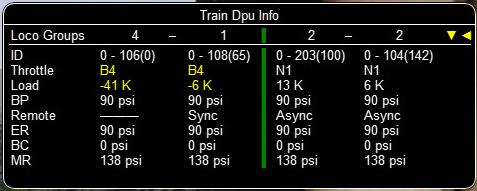
8.3.2. Engines of AI Trains
For AI trains, the AI software directly generates the remote control signals, i.e. there is no player-controlled locomotive. In this way, all engines use the same physics code for power and friction.
This software model will ensure that non-player controlled engines will behave exactly the same way as player controlled ones.
8.4. Open Rails Braking
Open Rails software has implemented its own braking physics in the current release. It is based on the Westinghouse 26C and 26F air brake and controller system. Open Rails braking will parse the type of braking from the .eng file to determine if the braking physics uses passenger or freight standards, self-lapping or not.
There are two different features regarding graduated release of brakes. If the train brake controller has a self-lapping notch that provides graduated release, then the amount of brake pressure can be adjusted up or down by changing the control in this notch. If the notch does not provide graduated release, then the brakes can only be increased in this notch and one of the release positions is required to release the brakes. The list of notches that have graduated release can be found here.
To achieve a graduated release, the brake valves in the train cars must have this capability. If the BrakeEquipmentType() parameter in the Wagon() section contains “Graduated_release_triple_valve” or “Distributor”, then the brake cylinder pressure is regulated to keep it proportional to the difference between the emergency reservoir pressure and the brake pipe pressure. If the brake valve is a “Triple_valve” instead, when the brake pipe pressure rises above the auxiliary reservoir pressure, the brake cylinder pressure is released completely at a rate determined by the retainer setting.
BrakeEquipmentType() can also contain a “Distributing_Valve” instead of a “triple_valve” or a “distributor”, for locomotives fitted with the Westinghouse ET-6 distributing valve or similar equipment.
Selecting Graduated Release Air Brakes in Menu > Options will force self-lapping notches in the brake controller to have graduated release. It will also force graduated release of brakes in triple valves. This option should be unchecked, except for compatibility problems with old MSTS stock.
The following brake types are implemented in OR. They can be selected using
the Wagon(BrakeSystemType parameter:
Vacuum single pipe:
BrakeSystemType ("Vacuum_single_pipe")Air single-pipe:
BrakeSystemType ("Air_single_pipe")Air twin-pipe:
BrakeSystemType ("Air_twin_pipe")EP (Electro-pneumatic, twin-pipe):
BrakeSystemType ("EP")EP single-pipe:
BrakeSystemType ("EP_single_pipe")Single-transfer-pipe (air and vacuum):
BrakeSystemType ("Air_piped")orBrakeSystemType ("Vacuum_piped")
The operation of air single-pipe brakes is described in general below.
The auxiliary reservoir needs to be charged by the brake pipe and, depending on the WAG file parameters setting, this can delay the brake release. The auxiliary reservoir is also charged by the emergency reservoir (until both are equal and then both are charged from the pipe).
Increasing the Brake Pipe Charging Rate (psi/s) value controls the charging rate. Increasing the value will reduce the time required to recharge the train; while decreasing the value will slow the charging rate. However, this might be limited by the train brake controller parameter settings in the ENG file. The brake pipe pressure cannot go up faster than that of the equalization reservoir.
The default value, 21, should cause the recharge time from a full set to be about 1 minute for every 12 cars. If the Brake Pipe Charging Rate (psi/s) value is set to 1000, the pipe pressure gradient features will be disabled and will also disable some but not all of the other new brake features.
For EP brakes, two variants are available:
If
Wagon(ORTSEPBrakeControlsBrakePipeis set to 0 (default situation), an electrical wire (application wire) provides simultaneous fast brake application along the train. Release time will be fast if standard air brake haven’t been applied, otherwise air brakes will determine release time. Typically this system is present with Train Brake Controllers having an EP-only application section, followed by an air application portion which serves as a fallback system, or in combination with a solenoid valve that isolates the triple valve when EP brakes are operational.If
Wagon(ORTSEPBrakeControlsBrakePipeis set to 1, brake pipe is charged and discharged simultaneously at each car in the train, providing fast and uniform brake application and release. The locomotive instructs the cars to “charge” or “discharge” the brake pipe to reach a reference pressure. Standard triple valves or distributors will follow brake pipe variations actuating the cylinders. This system is sometimes called “UIC EP brake”. It is typically the system used in high speed trains.
8.4.1. Train Brake Controller Positions
The following notch positions can be defined for the train brake at Engine(EngineControllers(Brake_Train:
RELEASE and RUNNING tokens
Brake Token: TrainBrakesControllerOverchargeStart
Operation: Air
Brake Systems: Air single pipe, Air twin pipe, EP
Description: RELEASE or OVERCHARGE
Rapidly releases air brakes and charges air reservoirs
Train brake pipe may be overcharged (up to ORTSTrainBrakesControllerMaxOverchargePressure) and will gradually return to normal working pressure when the controller is moved to a release position. (The rate will be determined by ORTSTrainBrakesControllerOverchargeEliminationRate.)
Brake Token: TrainBrakesControllerFullQuickReleaseStart
Operation: Air, EP, Vacuum
Brake Systems: Air single pipe, Air twin pipe, EP, Vacuum single pipe
Description: RELEASE or QUICK RELEASE
Air brakes: Rapidly releases air brakes and charges air reservoirs, without overcharging the train pipe.
EP brakes: Rapidly releases EP brakes.
Vacuum brakes:
diesel and electric loco:
Operates exhauster at fast speed. Rapidly releases vacuum brakes and charges vacuum reservoirs.
steam with combination ejector:
Operates large ejector at full power. Rapidly releases vacuum brakes and charges vacuum reservoirs.
steam with separate ejector:
Connects brake pipe to ejector(s) and/or vacuum pump. Brakes may be released by operating large or small ejector.
Brake Token: TrainBrakesControllerReleaseStart
Operation: Air, EP, Vacuum
Brake Systems: Air single pipe, Air twin pipe, EP, Vacuum single pipe
Description: RUNNING or RELEASE
Air brakes: Maintains working pressure in train pipe. Slowly releases brakes.
EP brakes: Releases brakes.
Vacuum brakes:
diesel and electric locos:
Connects brake pipe to exhauster. Maintains vacuum in train pipe. Slowly releases brakes.
steam with combination ejector:
Operates large ejector at full power. Rapidly releases vacuum brakes and charges vacuum reservoirs.
steam with separate ejector:
Connects brake pipe to ejector(s) and/or vacuum pump. Brakes may be released by operating large or small ejector.
Brake Token: EngineBrakesControllerBailOffStart
Operation: Air, EP, Vacuum
Brake Systems: Air single pipe, Air twin pipe, EP, Vacuum single pipe
Description:
Engine brake: bail off engine brakes
Train brake: no change
LAP, HOLDING and NEUTRAL tokens
Brake Token: TrainBrakesControllerRunningStart
Operation: Air, EP, Vacuum
Brake Systems: Air single pipe, Air twin pipe, EP, Vacuum single pipe
Description: LAP or RUNNING
Air brakes: Train pipe pressure is held at any pressure with compensation for leakage.
EP brakes: Brake application is held at any value.
Vacuum brakes:
diesel and electric locos:
Train pipe vacuum is held at any value with compensation for leakage.
steam with combination ejector:
Connects brake pipe to small ejector and/or vacuum pump. Maintains vacuum. Brakes may be released by operating small ejector.
steam with separate ejector:
Connects brake pipe only to small ejector and/or vacuum pump.
Brake Token: TrainBrakesControllerSelfLapStart
Operation: Air, EP, Vacuum
Brake Systems: Air single pipe, Air twin pipe, EP, Vacuum single pipe
Description: LAP
Air brakes: Train pipe pressure is held at any pressure with compensation for leakage.
EP brakes: Brake application is held at any value.
Vacuum brakes: Train pipe vacuum is held at any value with compensation for leakage.
Brake Token: TrainBrakesControllerHoldStart (legacy MSTS token)
Operation: Air, EP, Vacuum
Brake Systems: Air single pipe, Air twin pipe, EP, Vacuum single pipe
Description: LAP
All brake types held without change.
Brake Token: TrainBrakesControllerEPHoldStart
Operation: EP
Brake Systems: EP
Description: HOLD EP
EP brakes: Setting is held without influence on train air pipe.
Brake Token: TrainBrakesControllerHoldLappedStart
Operation: Air, EP, Vacuum
Brake Systems: Air single pipe, Air twin pipe, EP, Vacuum single pipe
Description: LAP or NEUTRAL
Air brakes: Train pipe pressure is held without compensation for leakage.
EP brakes: Brake application is held at any value.
Vacuum brakes: Train pipe vacuum is held without compensation for leakage.
Brake Token: TrainBrakesControllerNeutralHandleOffStart
Operation: Air, EP, Vacuum
Brake Systems: Air single pipe, Air twin pipe, EP, Vacuum single pipe
Description: LAP or NEUTRAL
Air brakes: Train pipe pressure is held without compensation for leakage.
EP brakes: Brake application is held at any value.
Vacuum brakes: Train pipe vacuum is held without compensation for leakage.
Brake Token: TrainBrakesControllerHoldEngineStart
Operation: Air, EP, Vacuum
Brake Systems: Air single pipe, Air twin pipe, EP, Vacuum single pipe
Description: HOLD ENGINE
Engine brakes: engine brake cylinder pressure is held at current value.
Train brakes: same as RELEASE/RUNNING
SELF LAPPING APPLY tokens
Brake Token: TrainBrakesControllerMinimalReductionStart
Operation: Air, Vacuum
Brake Systems: Air single pipe, Air twin pipe, Vacuum single pipe
Description: INITIAL / FIRST SERVICE
Notch: Train pipe pressure or vacuum is held at Minimum Reduction value.
Brake Token: TrainBrakesControllerGraduatedSelfLapLimitedHoldingStart
Operation: Air
Brake Systems: Air single pipe, Air twin pipe
Description: INITIAL / FIRST SERVICE << >> FULL SERVICE
Graduated service application of air brakes only. (Release is not graduable.)
Brake Token: TrainBrakesControllerEPApplyStart
Operation: Air, EP
Brake Systems: Air single pipe, Air twin pipe, EP
Description: INITIAL / FIRST SERVICE << >> FULL SERVICE
Graduated service application and release of air brakes and EP brakes. Can be used for notched controllers.
Brake Token: TrainBrakesControllerContinuousServiceStart
Operation: Air, EP
Brake Systems: Air single pipe, Air twin pipe, EP
Description: INITIAL / FIRST SERVICE >>>> FULL SERVICE
Graduated service application of air brakes and EP brakes. (Release is not graduable.)
Brake Token: TrainBrakesControllerEPOnlyStart
Operation: EP
Brake Systems: EP
Description: INITIAL / FIRST SERVICE << >> FULL SERVICE
Graduated service application and release of EP brakes only without reduction in air train pressure.
Brake Token: TrainBrakesControllerVacuumContinuousServiceStart
Operation: Vacuum
Brake Systems: Vacuum single pipe
Description: RUNNING << >> FULL SERVICE / EMERGENCY
Graduated application and release of vacuum brakes.
Brake Token: Dummy
Operation: Air, Vacuum
Brake Systems: Air single pipe, Air twin pipe, Vacuum single pipe
Description: RUNNING << >> FULL SERVICE / EMERGENCY
Train pipe pressure or vacuum can be held at any value.
Can be used for notched controllers.
NON SELF LAPPING APPLY tokens
Brake Token: TrainBrakesControllerSlowServiceStart
Operation: Air, EP
Brake Systems: Air single pipe, Air twin pipe, EP
Description: FIRST SERVICE or SLOW APPLY
Notch: Train brakes are applied at a slow rate from minimal application until full service application. The rate is determined by
ORTSTrainBrakesControllerSlowApplicationRatein the .eng file.
Brake Token: TrainBrakesControllerFullServiceStart
Operation: Air, EP
Brake Systems: Air single pipe, Air twin pipe, EP
Description: APPLY
Notch: Train brakes are applied at the normal service rate from minimal application until full service application.
Brake Token: TrainBrakesControllerEPFullServiceStart
Operation: EP
Brake Systems: EP
Description: EP APPLY
Notch: EP brakes are applied at the normal service rate without reduction in air train pipe pressure.
Brake Token: TrainBrakesControllerApplyStart
Operation: Air, EP, Vacuum
Brake Systems: Air single pipe, Air twin pipe, EP, Vacuum single pipe
Description: APPLY
Notch: Train brakes are applied at the normal service rate from minimal application until emergency application.
Vacuum brakes - steam. MSTS legacy controller is now replaced by next token
TrainBrakesControllerVacuumApplyContoinousServiceStart
Brake Token: TrainBrakesControllerVacuumApplyContoinousServiceStart
Operation: Vacuum
Brake Systems: Vacuum single pipe
Description: APPLY
Range: The rate of the brake application is determined by the position of the valve.
Brake Token: TrainBrakesControllerEmeregencyStart
Operation: Air, EP, Vacuum
Brake Systems: Air single pipe, Air twin pipe, EP, Vacuum single pipe
Description: EMERGENCY
Notch: Make a full emergency application of brakes at the fastest possible rate.
OTHER train brake controller tokens
Brake Token: TrainBrakesControllerSupressionStart
Operation: Air, EP
Brake Systems: Air single pipe, Air twin pipe, EP
Description: Cancels effect of penalty brake application by TCS and restores control of brakes to driver.
8.4.2. Brake Position Labels
The name of a given brake controller notch can be customized by adding an ORTSLabel block to the notch definition:
Notch ( 0.5 0 TrainBrakesControllerEPFullServiceStart ORTSLabel ( "Regeneration III and EP" ) )
8.4.3. Brake Shoe Adhesion
The braking of a train is impacted by the following two types of adhesion (friction coefficients):
Brakeshoe – the coefficient of friction of the brakeshoe varies due to the type of brake shoe, and the speed of the wheel increases. Typically older cast iron brake shoes had lower friction coefficients then more modern composite brakeshoes.
Wheel – the adhesion or friction coefficient between the wheel and the rail will also vary with different conditions, such as whether the track was dry or wet, and will also vary with the speed of rotation of the wheel.
Thus a train traveling at high speed will have lower brake shoe adhesion, which means that the train will take a longer time to stop (or alternatively more force needs to be applied to the brakeshoe to achieve the same slowing effect of the wheel, as at slower speeds). Traveling at high speeds may also result in insufficient force being available to stop the train, and therefore under some circumstances the train may become uncontrollable (unstoppable) or runaway on steep falling gradients.
Conversely if too much force is applied to the brakeshoe, then the wheel could lock up, and this could result in the wheel slipping along the rail once the adhesive force (wagon weight x coefficient of friction) of the wagon is exceeded by the braking force. In this instance the static friction between the wheel and the track will change to dynamic friction, which is significantly lower than the static friction, and thus the train will not be stopped in the desired time and distance.
When designing the braking forces railway engineers need to ensure that the maximum braking force applied to the wheels takes into account the above adhesion factors.
Implementation in Open Rails
Open Rails models the aspects described above, and operates within one of the following modes:
Advanced Adhesion NOT selected - brake force operates as per previous OR functionality, i.e. - constant brake force regardless of speed.
Advanced Adhesion SELECTED and legacy WAG files, or NO additional user friction data defined in WAG file - OR assumes the users assigned friction coefficient have been set at 20% friction coefficient for cast iron brakes, and reverse engineers the braking force, and then applies the default friction curve as the speed varies.
Advanced Adhesion SELECTED and additional user friction data HAS been defined in WAG file - OR applies the user defined friction/speed curve.
It should be noted that the MaxBrakeForce parameter in the WAG file is the actual force applied to the wheel after reduction by the friction coefficient.
Option iii) above is the ideal recommended method of operating, and naturally will require include files, or variations to the WAG file.
To setup the WAG file, the following values need to be set:
use the OR parameter
ORTSBrakeShoeFriction ( x, y )to define an appropriate friction/speed curve, where x = speed in kph, and y = brakeshoe friction. This parameter needs to be included in the WAG file near the section defining the brakes. This parameter allows the user to customise to any brake type.Define the
MaxBrakeForcevalue with a friction value equal to the zero speed value of the above curve, i.e. in the case of the curve below this woyuld be 0.49.
For example, a sample curve definition for a COBRA (COmposition BRAkes) brakeshoe might be as follows:
ORTSBrakeShoeFriction ( 0.0 0.49 8.0 ................ 80.5 0.298 88.5 0.295 96.6 0.289 104.6 0.288 )
The debug FORCES INFORMATION HUD has been modified by the addition of two extra columns:
Brk. Frict. - Column shows the current friction value of the brakeshoe and will vary according to the speed. (Applies to modes ii) and iii) above). In mode i) it will show friction constant at 100%, which indicates that the MaxBrakeForce defined in the WAG file is being used without alteration, ie it is constant regardless of the speed.
Brk. Slide - indicates that the vehicle wheels are sliding along the track under brake application. (Ref to Wheel Skidding due to Excessive Brake Force )
It should be noted that the Adhesion factor correction slider in the options menu will vary the brakeshoe coefficient above and below 100% (or unity). It is recommended that this is set @ the default value of 100%.
These changes introduce an extra challenge to train braking, but provide a more realistic train operation.
For example, in a lot of normal Westinghouse brake systems, a minimum pressure reduction was applied by moving the brake controller to the LAP position. Typically Westinghouse recommended values of between 7 and 10 psi.
8.4.4. Brake Shoe Force
As indicated above the MaxBrakeForce parameter in the WAG file is the actual force applied to the wheel after reduction by the friction coefficient, often railway companies will provide an Net Braking Ratio (NBR) value to
specify the amount of force to be applied to the brake shoe. This force is then reduced by the brake shoe CoF to determine the actual force applied to the wheel.
To facilitate the direct usage of the NBR value in the WAG file, the following parameters can be used. NB: When using these parameters the MaxBrakeForce parameter is not required.
Brake Shoe Force - This is the current change being implemented. The following changes and parameter are included.
ORTSMaxBrakeShoeForce - the force applied to the brake shoe is the main braking force.
ORTSBrakeShoeType - this defines a number of different brake shoe types and curves. To provide a more realistic representation of the braking force the default CoF curves are 2D, ie
they are impacted by both the speed and Brake Shoe Force. Typically ORTSBrakeShoeType will have one of the following keywords included -
Cast_Iron_P6 - older cast iron brake shoes, 2D as above, Cast_Iron_P10 - newer cast iron brake shoes with increased phosphorous, 2D as above, High_Friction_Composite
- high friction composite shoe, 2D as above, Disc_Pads - brakes with disc pads, 2D as above, User_Defined - is a user defined curve
using the ORTSBrakeShoeFriction parameter, 1D (ie, speed only, see above section for the parameter format).
ORTSNumberCarBrakeShoes - to facilitate the operation of the default 2D curves above it is necessary to configure the number of brake shoes for each car.
Whilst OR will attempt to set some defaults if parameters are left out, the most realistic operation will be achieved by using all the relevant parameters.
The following two legacy arrangements can be used as an alternative to the above method,
Legacy #1 - legacy arrangements using MaxBrakeForce on its own will remain unchanged. This in effect is an old MSTS file.
Legacy #2 - where MaxBrakeForce and ORTSBrakeShoeFriction have been set, legacy operation will remain unchanged.
8.4.5. Train Brake Pipe Losses
The train brake pipe on a train is subject to air losses through leakage at joints, etc. Typically when the brake controller is in the RUNNING position, air pressure is maintained in the pipe from the reservoir. However on some brake systems, especially older ones such as the A6-ET, when the brake controller is in the LAP position the train brake pipe is isolated from the air reservoir, and hence over time the pipe will suffer pressure drops due to leakages. This will result in the brakes being gradually applied.
Some brake systems allow small leakage to happen without applying brakes. This can be regulated with the parameter ORTSBrakeInsensitivity in the WAG file. UIC vehicles are usually insensitive to pressure drop rates lower than 0.3 bar/min. This parameter also prevents brakes being applied while an overcharge in the brake pipe is being eliminated.
More modern systems have a self lapping feature which compensates for train brake pipe leakage regardless of the position that the brake controller is in.
Open Rails models this feature whenever the TrainPipeLeakRate parameter is defined in the engine section of the ENG file. Typically most railway companies accepted leakage rates of around 5 psi/min in the train brake pipe before some remedial action needed to be undertaken.
If this parameter is left out of the ENG file, then no leakage will occur.
8.4.6. Wheel Skidding due to Excessive Brake Force
The application of excessive braking force onto a wheel can cause it to lock up and then start to slip along the rails. This occurs where the wagon braking force exceeds the adhesive weight force of the wagon wheel, i.e. the wheel to rail friction is overcome, and the wheel no longer grips the rails.
Typically this happens with lightly loaded vehicles at lower speeds, and hence the need to ensure that braking forces are applied to design standards. Skidding will be more likely to occur when the adhesion between the wheel and track is low, so for example skidding is more likely in wet weather then dry weather. The value Wag Adhesion in the FORCES INFORMATION HUD indicates this adhesion value, and will vary with the relevant weather conditions.
When a vehicle experiences wheel skid, an indication is provided in the FORCES INFORMATION HUD. To correct the problem the brakes must be released, and then applied slowly to ensure that the wheels are not locked up. Wheel skid will only occur if ADVANCED adhesion is selected in the options menu.
On some steam locomotives brakes are not applied to all the wheels, possibly only the drive wheels have braking, and the other wheels do not. The following parameter can be set to reflect this for the calculation of skidding.
ORTSLocomotiveDriveWheelOnlyBraking ( x ) - where x = 1 if brakes are only fitted to the drive wheels, set to 0 or leave blank if all wheels are braked.
8.4.7. Using the F5 HUD Expanded Braking Information
This helps users of Open Rails to understand the status of braking within the game and assists in realistically coupling and uncoupling cars. Open Rails braking physics is more realistic than MSTS, as it models the connection, charging and exhaust of brake lines.
When coupling to a static consist, note that the brake line for the newly added cars normally does not have any pressure. This is because the train brake line/hose has not yet been connected. The last columns of each line shows the condition of the air brake hose connections of each unit in the consist.

The columns under AnglCock describe the state of the Angle Cock, a
manually operated valve in each of the brake hoses of a car: A is the
cock at the front, B is the cock at the rear of the car. The symbol +
indicates that the cock is open and the symbol - that it is closed. The
column headed by T indicates if the hose on the locomotive or car is
interconnected: T means that there is no connection, I means it is
connected to the air pressure line. If the angle cocks of two consecutive
cars are B+ and A+ respectively, they will pass the main air hose
pressure between the two cars. In this example note that the locomotive
air brake lines start with A- (closed) and end with B- (closed) before
the air hoses are connected to the newly coupled cars. All of the newly
coupled cars in this example have their angle cocks open, including those
at the ends, so their brake pressures are zero. This will be reported as
Emergency state.
8.4.7.1. Coupling Cars
Also note that, immediately after coupling, you may also find that the
handbrakes of the newly added cars have their handbrakes set to 100% (see
column headed Handbrk). Pressing <Shift+;> (Shift plus semicolon
in English keyboards) will release all the handbrakes on the consist as
shown below. Pressing <Shift+'> (Shift plus apostrophe on English
keyboards) will set all of the handbrakes. Cars without handbrakes will
not have an entry in the handbrake column.
If the newly coupled cars are to be moved without using their air brakes and parked nearby, the brake pressure in their air hose may be left at zero: i.e. their hoses are not connected to the train’s air hose. Before the cars are uncoupled in their new location, their handbrakes should be set. The cars will continue to report State Emergency while coupled to the consist because their BC value is zero; they will not have any braking. The locomotive brakes must be used for braking. If the cars are uncoupled while in motion, they will continue coasting.
If the brakes of the newly connected cars are to be controlled by the
train’s air pressure as part of the consist, their hoses must be joined
together and to the train’s air hose and their angle cocks set correctly.
Pressing the Backslash key <\>) (in English keyboards; please check the
keyboard assignments for other keyboards) connects the brake hoses
between all cars that have been coupled to the engine and sets the
intermediate angle cocks to permit the air pressure to gradually approach
the same pressure in the entire hose. This models the operations
performed by the train crew. The HUD display changes to show the new
condition of the brake hose connections and angle cocks:

All of the hoses are now connected; only the angle cocks on the lead
locomotive and the last car are closed as indicated by the -. The rest
of the cocks are open (+) and the air hoses are joined together (all
I) to connect to the air supply on the lead locomotive.
Upon connection of the hoses of the new cars, recharging of the train brake line commences. Open Rails uses a default charging rate of about 1 minute per every 12 cars. The HUD display may report that the consist is in Emergency state; this is because the air pressure dropped when the empty car brake systems were connected. Ultimately the brake pressures reach their stable values:

If you don’t want to wait for the train brake line to charge, pressing
<Shift+/> (in English keyboards) executes Brakes Initialize which
will immediately fully charge the train brakes line to the final state.
However, this action is not prototypical and also does not allow control
of the brake retainers.
The state of the angle cocks, the hose connections and the air brake pressure of individual coupled cars can be manipulated by using the F9 Train Operations Monitor, described here. This will permit more realistic shunting of cars in freight yards.
8.4.7.2. Uncoupling Cars
When uncoupling cars from a consist, using the F5 HUD Expanded Brake
Display in conjunction with the F9 Train Operations Monitor display
allows the player to set the handbrakes on the cars to be uncoupled, and
to uncouple them without losing the air pressure in the remaining cars.
Before uncoupling, close the angle cock at the rear of the car ahead of
the first car to be uncoupled so that the air pressure in the remaining
consist is not lost when the air hoses to the uncoupled cars are
disconnected. If this procedure is not followed, the train braking system
will go into Emergency state and will require pressing the <\>
(backslash) key to connect the air hoses correctly and then waiting for
the brake pressure to stabilize again.
8.4.7.3. Setting Brake Retainers
If a long consist is to be taken down a long or steep grade the operator may
choose to set the Brake Retainers on some or all of the cars to create a
fixed braking force by those cars when the train brakes are released. (This
requires that the retainer capability of the cars be enabled; either by the
menu option Retainer valve on all cars, or by the
inclusion of an appropriate keyword in the car’s .wag file.) The train must be
fully stopped and the main brakes must be applied so that there is adequate
pressure in the brake cylinders. Pressing <Shift+]> controls how many
cars in the consist have their retainers set, and the pressure value that is
retained when the train brakes are released. The settings are described in
Brake Retainers below. Pressing <Shift+[>
cancels the settings and exhausts all of the air from the brake cylinders when
the brakes are released. The F5 display shows the symbol RV ZZ for the
state of the retainer valve in all cars, where ZZ is: EX for Exhaust or
LP or HP. When the system brakes are released and there are no
retainers set, the air in the brake cylinders in the cars is normally released
to the air. The BC pressure for the cars with retainers set will not fall below
the specified value. In order to change the retainer settings, the train must
be fully stopped. A sample F5 view with 50% LP is shown below:

8.4.8. Dynamic Brakes
Open Rails software supports dynamic braking for engines. To increase the Dynamic brakes press Period (.) and Comma (,) to decrease them. Dynamic brakes are usually off at train startup (this can be overridden by the related MSTS setting in the .eng file), the throttle works and there is no value shown in the dynamic brake line in the HUD. To turn on dynamic brakes set the throttle to zero and then press Period. Pressing Period successively increases the Dynamic braking forces. If the value n in the MSTS parameter DynamicBrakesDelayTimeBeforeEngaging ( n ) is greater than zero, the dynamic brake will engage only after n seconds. The throttle will not work when the Dynamic brakes are on.
The Dynamic brake force as a function of control setting and speed can be defined in a DynamicBrakeForceCurves table that works like the MaxTractiveForceCurves table. If there is no DynamicBrakeForceCurves defined in the ENG file, than one is created based on the MSTS parameter values.
It is possible to use dynamic brakes as a replacement for air brakes when they are available (“local” dynamic brake blending). During blending operation, the following parameters will adjust the behaviour of air brakes:
Engine(DynamicBrakeHasAutoBailOff– Set to 1 if brake cylinders are emptied while dynamic brake is activeEngine(ORTSDynamicBrakesHasPartialBailOff– If this parameter is set to 1, air brakes are released while dynamic brakes satisfy the train brake demand. If dynamic braking is not sufficient, air brakes will be partially applied so the combination air+dynamic provides the required brake demand.Engine(ORTSDynamicBlendingRetainedPressure– Sets the brake cylinder pressure which, when used in combination with ORTSDynamicBrakesHasPartialBailOff, will remain applied regardless of the blended dynamic brake force. This pressure is also the minimum pressure at which the blended braking system will activate.Engine(ORTSDynamicBlendingMinimumSpeed– Below the specified speed (default units mph, default value 5 mph / 8 kph), local dynamic brake blending will be disabled, allowing locomotive brakes to hold the train while stopped.
Sometimes the train brake controller is capable to apply the dynamic brakes for the whole consist, usually as a first step before air brakes are applied. This is usually known as “train blending”, as opposed to “local” blending which only affects dynamic braking on the locomotive itself. A blending table which looks similar to the DynamicBrakeForceCurves table is available. It specifies the amount of dynamic brake that is applied at each notch of the train brake controller, where 0 means no dynamic brake and 1 means full dynamic brake:
Engine(
ORTSTrainDynamicBlendingTable(
comment ( Notch 0 of train brake - no dynamic brake applied )
0 (
0 0
300km/h 0
)
comment ( 30% of Train brake - apply full dynamic brake )
0.3 (
0 1
300km/h 1
)
comment ( 90% of Train brake - still apply full dynamic brake )
0.9 (
0 1
300km/h 1
)
comment ( Emergency brake notch - do not command dynamic brake )
1 (
0 0
300km/h 0
)
)
)
Dynamic braking is not effective at low speeds. Thus, in some locomotives,
dynamic brake application demanded by the train brake controller is replaced by
engine air braking at low speeds. This effect can be activated setting
Engine(ORTSDynamicBrakeReplacementWithEngineBrake to 1, provided that the locomotive
speed is below Engine(ORTSDynamicBrakeReplacementWithEngineBrakeAtSpeed.
8.4.9. Native Open Rails Braking Parameters
Open Rails has implemented additional specific braking parameters to deliver realism in braking performance in the simulation.
Following are a list of specific OR parameters and their default values. The default values are used in place of MSTS braking parameters; however, two MSTS parameters are used for the release state: MaxAuxilaryChargingRate and EmergencyResChargingRate.
Wagon(BrakePipeVolume– Volume of car’s brake pipe in cubic feet (default .5). This is dependent on the train length calculated from the ENG to the last car in the train. This aggregate factor is used to approximate the effects of train length on other factors. Strictly speaking this value should depend on the car length, but the Open Rails Development team doesn’t believe it is worth the extra complication or CPU time that would be needed to calculate it in real time. We will let the community customize this effect by adjusting the brake servicetimefactor instead, but the Open Rails Development team doesn’t believe this is worth the effort by the user for the added realism.Wagon(ORTSBrakeForceReferencePressure– The brake cylinder pressure at which the brake force entered inMaxBrakeForceorORTSMaxBrakeShoeForceoccurs. If this value is not defined,BrakeCylinderPressureForMaxBrakeBrakeForceis used as the reference pressure.Wagon(ORTSAuxiliaryResCapacity– Volume of the car’s auxiliary reservoir. Normally determined automatically given the emergency res volume, but can be entered manually if the car has no emergency res.Wagon(ORTSBrakeCylinderVolume– Volume of each brake cylinder on the car. This allows specifying the brake cylinder volume independently of triple valve ratio. This is useful when the cylinder is not directly attached to a triple valve, e. g. when a relay valve exists.Wagon(ORTSBrakeCylinderDiameter– If brake cylinder dimensions are available, this can be used to set the diameter of the piston in each brake cylinder. WARNING: Applying this token will enable a more realistic simulation of brake cylinder pressure which may require adjustments to brake system parameters to produce the desired brake cylinder pressure.Wagon(ORTSBrakeCylinderPistonTravel– The length of brake cylinder extension when the brakes are applied at 50 psi (3.5 bar). Larger travel leads to larger brake cylinder volume, and volume will increase as the brake cylinder pressurizes. (Default 7.5 inches.)Wagon(ORTSCylinderSpringPressure– The brake cylinder pressure at which the brake cylinder piston reaches full extension. Below this pressure, no brake force will be developed (default 5 psi).Wagon(ORTSBrakeCylinderPipingVolume– The volume of the piping between the brake valve and each brake cylinder, including any volume of air in the brake cylinder when released. This volume does not change as the brake cylinder extends, but can still affect the final brake cylinder pressure. If not specified, Open Rails will automatically calculate a volume to produce appropriate brake cylinder pressures from the given TripleValveRatio. A warning will be produced if the automatic calculation cannot determine a suitable piping volume.Wagon(ORTSNumberBrakeCylinders– Sets the number of brake cylinders on the car, multiplies the brake cylinder volume. (Default 1 brake cylinder.)Wagon(ORTSEmergencyValveActuationRate– Threshold rate for emergency brake actuation of the triple valve. If the pressure in the brake pipe decreases at a higher rate than specified, the triple valve will switch to emergency mode.Wagon(ORTSEmergencyDumpValveRate– Rate at which BP is locally discharged at every wagon during an emergency brake application.Wagon(ORTSEmergencyDumpValveTimer– Timer for emergency dump valve to close after it is activated. If set to 0, it will close as soon as BP is discharged. Default value will prevent BP from being charged for 2 minutes.Wagon(ORTSEmergencyQuickAction– If set to 1, air from the brake pipe will be sent to the brake cylinder at MaxApplicationRate during emergency applications. Speeds up emergency application along the entire train. (default 0)Wagon(ORTSEmergencyResQuickRelease– Set to 1 (default 0) to enable quick release, in which emergency reservoir air is used to increase the brake pipe pressure during release. Remains active until aux res has recharged. For systems with a dedicated quick release reservoir but without higher brake cylinder pressure in emergency, set this to 2 to disable use of the emergency res for brake cylinder pressure.Wagon(ORTSMainResPipeAuxResCharging– Boolean value that indicates, for twin pipe systems, if the main reservoir pipe is used for charging the auxiliary reservoirs. Alternately, if equipped with a supply reservoir, the supply reservoir will charge from the main reservoir pipe instead. If set to false, the main reservoir pipe will not be used (default: true). by the brake system.Wagon(ORTSEPBrakeControlsBrakePipe– Set to 1 for UIC EP brake: brake pipe pressure is electrically controlled at every fitted car.Wagon(ORTSEPBrakeInhibitsTripleValve– Set to 1 if the car is fitted with a selector valve that ignores brake pipe pressure when EP brakes are operational.Wagon(ORTSBrakeRelayValveRatio– Determines the proportionality constant between pressure as demanded by the triple valve and brake cylinder pressure. This is achieved via a relay valve which sets BC pressure proportionally. Relay valves may be installed to achieve higher brake cylinder pressures, dynamic brake blending or variable load compensation.Wagon(ORTSBrakeRelayValveInshot– Sets the “in-shot” pressure for the relay valve. If set to a positive value, this pressure will be added to the brake cylinder across the entire range of relay valve application. If set to a negative value, this pressure will override the brake cylinder pressure only if the relay valve application is lower than this pressure. In either case, this sets a minimum brake cylinder pressure. Many step down relay valves (ratio less than 1) utilize in-shot to ensure brake cylinders extend fully for light train brake applications.Wagon(ORTSEngineBrakeRelayValveRatio– Same asORTSBrakeRelayValveRatio, but for the engine brake.Wagon(ORTSEngineBrakeRelayValveInshot– Same asORTSBrakeRelayValveInshot, but for the engine brake.Wagon(ORTSBrakeRelayValveApplicationRate– Brake cylinder pressure application rate achieved by the relay valve, if fitted.Wagon(ORTSBrakeRelayValveReleaseRate– Brake cylinder pressure release rate achieved by the relay valve, if fitted.Wagon(ORTSMaxTripleValveCylinderPressure– Maximum cylinder pressure demanded by the triple valve. For example, UIC distributors set maximum cylinder pressure to 3.8 bar when brake pipe is below 3.5 bar, and further brake pipe discharging does not increase cylinder pressure.Wagon(ORTSMaxServiceCylinderPressure– Sets the maximum cylinder pressure demanded during service applications. During emergency applications, brake cylinder pressure is instead limited byORTSMaxTripleValveCylinderPressure.Wagon(ORTSMaxServiceApplicationRate– Sets the maximum application rate allowed during service applications. For emergency applications, the application rate will be limited byMaxApplicationRate.Wagon(ORTSTwoStageLowPressure– For two stage braking systems where brake force changes depending on train speed, this sets the maximum cylinder pressure demanded when in low speed mode (defaults to 0, disabling two stage braking). For high speed mode, useORTSMaxServiceCylinderPressureto set the pressure limit.Wagon(ORTSTwoStageRelayValveRatio– Alternatey, sets a relay valve ratio to be used by the two stage system in low speed mode. At high speeds, the relay valve uses the ratio set byORTSBrakeRelayValveRatio.Wagon(ORTSTwoStageIncreasingSpeed– The speed at which the two stage braking system changes from low speed mode to high speed mode during acceleration.Wagon(ORTSTwoStageDecreasingSpeed– The speed at which the two stage braking system changes from high speed mode to low speed mode during deceleration.Wagon(ORTSHighSpeedReducingPressure– If the demanded brake cylinder pressure exceeds this value, the brakes will gradually release to this pressure. Simulates the high speed reducing valve (HSRV). (default 0 for wagons with no HSRV)Wagon(ORTSUniformChargingThreshold– The pressure difference between the brake pipe and auxiliary reservoir at which uniform charging activates during release (default 3 psi), usually used to reduce the rate of auxiliary reservoir charging.Wagon(ORTSUniformChargingRatio– Factor used to divide auxiliary reservoir charging rate by when uniform charging is active. Eg: setting of 2 will halve charging rate while uniform charging is active (defaults to 0, disabling the feature).Wagon(ORTSUniformReleaseThreshold– The pressure difference between the brake pipe and auxiliary reservoir at which uniform release activates during release (default 3 psi), usually used to reduce the rate of brake cylinder release.Wagon(ORTSUniformReleaseRatio– Factor used to divide brake cylinder release rate by when uniform release is active. Eg: setting of 2 will halve release rate while uniform release is active (defaults to 0, disabling the feature).Wagon(ORTSQuickServiceLimit– Quick service activates when triple valve initially changes from release to apply, and will remain active until brake cylinder pressure reaches the pressure specified here (default 0, which disables quick service).Wagon(ORTSQuickServiceApplicationRate– Optional setting for brake cylinder application rate used during quick service, can be used to increase speed of initial applications. Has no effect if set lower thanMaxApplicationRate(default 0).Wagon(ORTSQuickServiceVentRate– Dramatically speeds up propagation of initial applications by venting the wagon brake pipe pressure at the specified rate until an initial application has been established (default 0).Wagon(ORTSAcceleratedApplicationFactor– Triple valves can speed up applications by measuring the rate of brake pipe reduction, multiplying the reduction by the factor specified here, then locally venting that amount of brake pipe air. Eg: a factor of 0.5 will speed up brake pipe propogation by +50%. Warning: Large factors can cause out of control brake pipe reductions, avoid settings larger than 1 (default 0, which disables the feature entirely).Wagon(ORTSAcceleratedApplicationMaxVentRate– Sets the maximum rate at which accelerated application will reduce the brake pipe pressure (default 5 psi/s).Wagon(ORTSInitialApplicationThreshold– The pressure difference between the brake pipe and auxiliary reservoir at which the triple valve will change from release to apply (default 1 psi).Wagon(BrakeEquipmentType(Supply_Reservoir– Adds a supply reservoir to the loco or wagon, which will constantly charge to the brake pipe pressure or MR pipe (if equipped) pressure. If a supply reservoir is equipped, supply res air will be used to pressurize the brake cylinders thru the relay valve. This allows for a small, fast charging auxiliary reservoir to be used with large brake cylinders.Wagon(ORTSSupplyResCapacity– Volume of the supply reservoir. Larger volumes relative to the brake cylinder volume allow for more brake applications. Can also be implemented asEngine(ORTSSupplyResCapacityfor engines.Wagon(ORTSSupplyResChargingRate– The rate at which the pressure of the supply reservoir will increase when charging from the brake pipe or MR pipe. Can also be implemented asEngine(ORTSSupplyResChargingRatefor engines.Engine(ORTSMainResChargingRate– Rate of main reservoir pressure change in psi per second when the compressor is on (default .4).Engine(ORTSEngineBrakeReleaseRate– Rate of engine brake pressure decrease in psi per second (default 12.5).Engine(ORTSEngineBrakeApplicationRate– Rate of engine brake pressure increase in psi per second (default 12.5).Engine(ORTSBrakePipeChargingRate– Rate of lead engine brake pipe pressure increase in PSI per second (default 21).Engine(ORTSBrakePipeQuickChargingRate– Rate of lead engine brake pipe pressure increase in PSI per second during a quick release (by default will be equal to ORTSBrakePipeChargingRate).Engine(ORTSBrakeServiceTimeFactor– Time in seconds for lead engine brake pipe pressure to drop to about 1/3 for service application (default 1.009).Engine(ORTSBrakeEmergencyTimeFactor– Time in seconds for lead engine brake pipe pressure to drop to about 1/3 in emergency (default .1).Engine(ORTSBrakePipeTimeFactor– Time in seconds for a difference in pipe pressure between adjacent cars to equalize to about 1/3 (default .003).Engine(AirBrakeMaxMainResPipePressure– Pressure in Main Reservoir Pipe for twin pipe braking systems (default = Main Reservoir Pressure).Engine(ORTSCompressorIsMuControlled– Set to 1 if compressors from all locomotives are synchronized.Wagon(BrakeEquipmentType(Emergency_Solenoid_Valve– Adds an electrically controlled valve that quickly applies maximum brake cylinder pressure during an emergency braking. Only available if the brake cylinder pressure is controlled using a relay valve.
8.4.10. Brake Retainers
The retainers of a car will only be available if either the General Option
Retainer valve on all cars is checked, or the car’s
.wag file contains a retainer valve declaration. To declare a retainer the line
BrakeEquipmentType ( ) in the .wag file must include either the item
Retainer_4_Position or the item Retainer_3_Position. A 4 position
retainer includes four states: exhaust, low pressure (10 psi), high pressure
(20 psi), and slow direct (gradual drop to zero). A 3 position retainer does
not include the low pressure position. The use and display of the retainers is
described in Extended HUD for Brake Information.
The setting of the retained pressure and the number of retainers is controlled using the Ctrl+[ and Ctrl+] keys (Ctrl plus the left and right square bracket ([ and ]) keys on an English keyboard). The Ctrl+[ key will reset the retainer on all cars in the consist to exhaust (the default position). Each time the Ctrl+] key is pressed the retainer settings are changed in a defined sequence. First the fraction of the cars set at a low pressure is selected (25%, 50% and then 100% of the cars), then the fraction of the cars at a high pressure is selected instead, then the fraction at slow direct. For the 25% setting the retainer is set on every fourth car starting at the rear of the train, 50% sets every other car and 100% sets every car. These changes can only be made when the train is stopped. When the retainer is set to exhaust, the ENG file release rate value is used, otherwise the pressures and release rates are hard coded based on some AB brake documentation used by the Open Rails development team.
8.4.11. Emergency Brake Application Key
The Backspace key is used, as in MSTS, to apply the train brakes in an emergency situation without requiring operation of the train brake lever. However in OR moving the brake lever back to the Release position will only cause OR to report Apply Emergency Brake Push Button. The Backspace key must be pressed again to cancel the emergency application, then normal operation can be resumed. When the button is active, the F5 HUD will display Emergency Brake Push Button in the Train Brake line.
8.4.12. Automatic Vacuum Brakes
Automatic Vacuum braking has been implemented in Open Rails in one of the two following forms:
Direct Vacuum - in this form, while ever the Brake Pipe (BP) is connected to the ejectors or vacuum pump, depending upon the operating capacity of the ejectors, a vacuum will be maintained or created. Typically this will be when the brake controller is in a Brake Off position.
Equalising Reservoir (EQ) - in this form a main vacuum reservoir is fitted to the locomotive, along with the equalising reservoir. Typically the main reservoir is maintained at a sufficiently high enough vacuum to create the vacuum in the BP to release the brakes. The BP vacuum will equalise at the vacuum set by the driver on the equalising reservoir.
As the altitude at which the train is operating increases, so the effectiveness of vacuum brakes decreases. For example, if a train is operating with a 21InHg system, based upon the following railway highest points in the countries indicated, it would be expect that only the following maximum possible vacuum levels would be achieveable:
UK = 350m = 20InHg Aus = 923m = 19InHg USA = 4,301m = 14InHg
In general, brakes (in particular a system with an equalising reservoir) will have three potential timings that impact the application or the releasing of the brakes.
In the equalising reservoir as the brake controller is varied
In the train brake pipe as the vacuum is increased or decreased
In the brake cylinder as it is applied or released.
In the case of brakes without an equalising reservoir only items ii) and iii) are valid in the above list.
The OR code attempts to model the above three items, however some compromises may need to be made, and it is suggested that the best outcome will be achieved when an overall timing approach is considered, rather than considering each of the individual components in isolation.
To enable the Equalising Reservoir option above BrakesTrainBrakeType must be set
to vacuum_single_pipe_eq in the engine section of the ENG file.
Following is a list of specific OR parameters and their default values. The default values can be overwritten by including the following parameters into the relevant wagon section of the WAG or ENG file.
wagon(BrakePipeVolume– Volume of brake pipe fitted to car in cubic feet (default calculated from car length, and assumption of 2in BP).wagon(ORTSAuxilaryResCapacity– Volume of auxiliary vacuum reservoir (coupled to brake cylinder) in cubic feet (default calculated on basis of 24in reservoir).wagon(ORTSBrakeCylinderSize– Size of brake cylinders fitted to wagon in inches (default assumes a 18in brake cylinder).wagon(ORTSNumberBrakeCylinders– Number of brake cylinders fitted to wagon, as an integer number (default 2).wagon(ORTSDirectAdmissionValve– Car has direct admission valves fitted, 0 = No, 1 = Yes (default No).wagon(ORTSBrakeShoeFriction– defines the friction curve for the brake shoe with speed (default curve for cast iron brake shoes included in OR).
Other standard brake parameters such as MaxBrakeForce, MaxReleaseRate, MaxApplicationRate,
BrakeCylinderPressureForMaxBrakeBrakeForce can be used as well.
Additionaly the following are defined in the engine section of the ENG file:
engine(BrakeCylinderPressureForMaxBrakeBrakeForce– sets the rate at which the brake pipe charges in InHg per second (default 0.32) This value should be calculated on the basis of feeding into a 200ft^3 brake system, as OR will adjust the value depending upon the connected volume of the brake cylinders and brake pipe.engine(ORTSBrakeServiceTimeFactor– Time for lead engine brake pipe pressure to drop in seconds (default 10.0)engine(ORTSBrakeEmergencyTimeFactor– Time for lead engine brake pipe pressure to drop under emergency conditions, in seconds (default 1.0)engine(ORTSBrakePipeTimeFactor– Controls propagation increase time along train pipe as vacuum increases, ie when brakes released, in seconds (default 0.02)engine(TrainPipeLeakRate– Rate at which the train brake pipe leaks at, in InHg per second (default no leakage)engine(ORTSVacuumBrakesMainResVolume– The volume of the main vacuum brake reservoir in cubic feet (default 110.0 , EQ operation only)engine(ORTSVacuumBrakesMainResMaxVacuum– The maximum vacuum in the main vacuum brake reservoir. When this pressure is reached the exhauster will automatically stop running, in InHg. (default 23 , EQ operation only)engine(ORTSVacuumBrakesExhausterRestartVacuum– pressure below which the exhauster will start to operate to recharge the main reservoir, in InHg (default 21 , EQ operation only)engine(ORTSVacuumBrakesMainResChargingRate– rate at which the main vacuum reservoir charges at, in InHg per second (default 0.2, EQ operation only)
Note: It is strongly recommended that UoM be used whenever units such as InHg, etc are specificed in the above parameters.
Other standard brake parameters such as VacuumBrakesHasVacuumPump, VacuumBrakesMinBoilerPressureMaxVacuum,
VacuumBrakesSmallEjectorUsageRate, VacuumBrakesLargeEjectorUsageRate can be defined as well.
When defining the Brake Controllers for vacuum braked locomotives, only the following BrakesController
tokens should be used - TrainBrakesControllerFullQuickReleaseStart, TrainBrakesControllerReleaseStart,
TrainBrakesControllerRunningStart, TrainBrakesControllerApplyStart, TrainBrakesControllerHoldLappedStart,
TrainBrakesControllerVacuumContinuousServiceStart, TrainBrakesControllerEmergencyStart,
EngineBrakesControllerReleaseStart, EngineBrakesControllerRunningStart, EngineBrakesControllerApplyStart.
If TrainPipeLeakRate has been set in the ENG file, then the small ejector will be required to offset the leakage
in the Brake Pipe. The J and Shft-J keys can be used to increase/decrease the level of operation of the small ejector.
An engine controller can be configured to customise the operation of the small ejector. This controller is called
ORTSSmallEjector ( w, x, y, z ), and will be set up as a standard 4 value controller.
An engine controller can also be configured to customise the operation of the large ejector. This controller is called
ORTSLargeEjector ( w, x, y, z ), and will be set up as a standard 4 value controller. The large ejector needs to
be operated to release the brakes. The Alt-J and Ctrl-J keys can be used to decrease/increase the level of
operation of the large ejector.
In diesel and electric locomotives, the Vacuum Exhauster preforms a similar function to the small and large ejector,
but in an “automated” fashion. The J key can be used to run the vacuum exhauster at high speed to facilitate a
quicker release of the brakes. An engine controller called ORTSFastVacuumExhauster ( x y z ), and will be set
up as a standard 3 value controller.
If it is not desired to operate the large ejector, a simplified brake operation can be used by selecting the “Simple Contol and Physics” option in the options menu (Simulator TAB). This option can also be used if there is a “mismatch” between the locomotive and car brakes to set a standard default set of brakes.
Engine brakes can also be configured for locomotives as required. They will work in a similar fashion to those fitted to air braked locomotives.
8.4.13. Non Automatic Vacuum Brakes
Non automatic (or Straight) vacuum braking has been added to OR. This braking has been based upon the Eames and Hardy vacuum braking systems.
Straight brakes operate in the reverse way to “normal” vacuum brakes, ie the train brake pipe needs to have a vacuum created in it to apply the brakes, and air needs to be allowed into the brake pipe to release the brakes. The straight brake had the major disadvantage that if the brake pipe was interupted then the brakes would not be able to be applied and stop the train. Consequently they were only mostly applied to early trains and were replaced over time by automatic brakes.
To configure a car with manual braking then in the car brake section configure the fllowing two parameters:
BrakeEquipmentType( "Straight_Vacuum_Single_Pipe" )
Additional train controllers have been added to facilitate the operation of straight braked controlled cars.
TrainBrakesControllerStraightBrakingReleaseOffStart - closes the Eames release valve
TrainBrakesControllerStraightBrakingReleaseOnStart - opens the Eames release valve to release the brakes.
The normal large ejector controls need to be used to apply the brakes (use Alt-J and Ctrl-J keys )
TrainBrakesControllerStraightBrakingReleaseStart - Hardy brake - release
TrainBrakesControllerStraightBrakingLapStart - Hardy brake - hold at current vacuum level
TrainBrakesControllerStraightBrakingApplyStart - Hardy brake - twin ejector - use large ejector to apply
brakes on train only
TrainBrakesControllerStraightBrakingApplyAllStart - Hardy brake - single ejector type - use large ejector to apply
brakes
TrainBrakesControllerStraightBrakingEmergencyStart - Hardy brake - twin ejector type - use large and small ejector
to apply brakes on train, locomotive and tender
Similar timing parameters to those used in the Vacuum Brake above are used in this brake type.
8.4.14. Manual Brakes
Manual braking is provided in OR to facilitate cars with no brakes fitted (for example Stephenson’s Rocket locomotive initially had no brakes fitted). Alternatively some trains used manually operated brakes controlled by a brakeman. This feature allows for the creation of braking on selected cars along the train that are operated by a brakeman (for example some trains had brakes only on the locomotive and the brakevans (caboose) which would be operated to control the stopping of the train.
An additional engine controller has been added to facilitate the operation of all brakeman (manual braked) controlled cars.
The controller can be added to an ENG file in a similar fashion to an air brake or vacuum controller by using the following
brake controller parameter: TrainBrakesControllerManualBrakingStart
To configure a car with manual braking then in the car brake section configure the following two parameters:
BrakeSystemType ( "Manual_Braking" )
BrakeEquipmentType( "Manual_brake, Handbrake" )
If the BrakeEquipmentType is left out, OR will assume that no braking is fitted to the car.
The following values, in the wagon section of the file need to be set for a manually braked car:
MaxBrakeForceMaxReleaseRateMaxApplicationRate
The manual brake can be increased by pressing Alt-], and decreased by pressing Alt-[.
8.4.15. Steam Brakes
Steam brakes can be applied to a locomotive, and its corresponding tender, by adding the following parameter to the ENG file:
BrakesEngineBrakeType ( "Steam_brake" )
The brake can be applied by pressing ], and released by pressing the [ keys.
To control the application and release rates on the brake use the EngineBrakesControllerMaxApplicationRate and
EngineBrakesControllerMaxReleaseRate parameters.
The SteamBrakeFX special effect, if added to the wagon, will turn on and off with the brake operation
and can be used to model steam leakage of the steam brake cylinder, etc.
8.4.16. Wheel Slide Protection
Open Rails supports the use of Wheel Slide Protection (WSP) on trains with air brakes. WSP operates as described below.
During braking wheelslide control is effected throughout the train by additional equipment on each vehicle. In the piping to each pair of brake cylinders are fitted electrically operated dump valves. When axle rotations which are sensed electrically, differ by a predetermined speed the dump valves are operated releasing brake cylinder pressure to both axles of the affected bogie.
Dump valve operation will cease when differences in axle rotations are within specified limits or the axle accelerates faster than a specified rate. The dump valve will only operate for a maximum period of seven seconds after which time it will be de-energised and the dump valve will not re-operate until the train has stopped or the throttle operated.
Dump valve operation is prevented under the following conditions:
When the Power Controller is open.
When Brake Pipe Pressure has been reduced below 36 psi (250 kPa).
To enable WSP ORTSWheelBrakeSlideProtection (1). If it is desired that emergency braking should not be impacted by WSP, then use
the ORTSEmergencyBrakingDisablesWSP (1) parameter.
When WSP is active the brake cylinder pressure reading will go yellow in the extended HuD on the BRAKE INFORMATION screen.
8.4.17. SME (sometimes also called SEM) Brake System
SME braking is a straight air-brake system having an automatic emergency feature by means of which the simplicity of the straight air brake is retained for service operation, but it also has the additional protection afforded by the automatic application of the brake in case of a break-in-two or the bursting of a hose. SME braking is typically used on short DMU rail sets. SME braking is a form of electro-pneumatic (EP) brake system, however EP and SME equipped cars cannot be mixed together in the same consist.
To activate SME braking, set BrakeSystemType ( SME ).
The following brake tokens can be used with it:
TrainBrakesControllerSMEOnlyStart
TrainBrakesControllerSMEFullServiceStart
TrainBrakesControllerSMEHoldStart
TrainBrakesControllerSMEReleaseStart
8.5. Dynamically Evolving Tractive Force
The Open Rails development team has been experimenting with
max/continuous tractive force, where it can be dynamically altered during
game play using the ORTSMaxTractiveForceCurves parameter as shown
earlier. The parameters were based on the Handbook of Railway Vehicle
Dynamics. This says the increased traction motor heat increase resistance
which decreases current and tractive force. We used a moving average of
the actual tractive force to approximate the heat in the motors. Tractive
force is allowed to be at the maximum per the ENG file, if the average
heat calculation is near zero. If the average is near the continuous
rating than the tractive force is de-rated to the continuous rating.
There is a parameter called ORTSContinuousForceTimeFactor that roughly
controls the time over which the tractive force is averaged. The default
is 1800 seconds.
8.6. Curve Resistance - Theory
8.6.1. Introduction
When a train travels around a curve, due to the track resisting the direction of travel (i.e. the train wants to continue in a straight line), it experiences increased resistance as it is pushed around the curve. Over the years there has been much discussion about how to accurately calculate curve friction. The calculation methodology presented (and used in OR) is meant to be representative of the impacts that curve friction will have on rolling stock performance.
8.6.2. Factors Impacting Curve Friction
A number of factors impact upon the value of resistance that the curve presents to the trains movement, as follows:
Curve radius – the smaller the curve radius the higher the higher the resistance to the train
Rolling Stock Rigid Wheelbase – the longer the rigid wheelbase of the vehicle, the higher the resistance to the train. Modern bogie stock tends to have shorter rigid wheelbase values and is not as bad as the older style 4 wheel wagons.
Speed – the speed of the train around the curve will impact upon the value of resistance, typically above and below the equilibrium speed (i.e. when all the wheels of the rolling stock are perfectly aligned between the tracks). See the section below Impact of superelevation.
The impact of wind resistance on curve friction is calculated in the general calculations for Wind Resistance.
8.6.3. Impact of Rigid Wheelbase
The length of the rigid wheelbase of rolling stock will impact the value of curve resistance. Typically rolling stock with longer rigid wheelbases will experience a higher degree of rubbing or frictional resistance on tight curves, compared to stock with smaller wheelbases.
Steam locomotives usually created the biggest problem in regard to this as their drive wheels tended to be in a single rigid wheelbase as shown in figure. In some instances on routes with tighter curve the inside wheels of the locomotive were sometimes made flangeless to allow them to float across the track head. Articulated locomotives, such as Shays, tended to have their drive wheels grouped in bogies similar to diesel locomotives and hence were favoured for routes with tight curves.
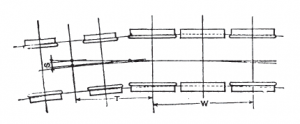
Diagram Source: The Baldwin Locomotive Works – Locomotive Data – 1944 Example of Rigid Wheelbase in steam locomotive
The value used for the rigid wheelbase is shown as W in figure
8.6.4. Impact of Superelevation
On any curve whose outer rail is superelevated there is, for any car, one speed of operation at which the car trucks have no more tendency to run toward either rail than they have on straight track, where both rail-heads are at the same level (known as the equilibrium speed). At lower speeds the trucks tend constantly to run down against the inside rail of the curve, and thereby increase the flange friction; whilst at higher speeds they run toward the outer rail, with the same effect. This may be made clearer by reference to figure below, which represents the forces which operate on a car at its centre of gravity.
With the car at rest on the curve there is a component of the weight W
which tends to move the car down toward the inner rail. When the car moves
along the track centrifugal force Fc comes into play and the car action
is controlled by the force Fr which is the resultant of W and
Fc. The force Fr likewise has a component which, still tends to
move the car toward the inner rail. This tendency persists until, with
increasing speed, the value of Fc becomes great enough to cause the
line of operation of Fr to coincide with the centre line of the track
perpendicular to the plane of the rails. At this equilibrium speed there is
no longer any tendency of the trucks to run toward either rail. If the
speed be still further increased, the component of Fr rises again, but
now on the opposite side of the centre line of the track and is of opposite
sense, causing the trucks to tend to move toward the outer instead of the
inner rail, and thereby reviving the extra flange friction. It should be
emphasized that the flange friction arising from the play of the forces
here under discussion is distinct from and in excess of the flange friction
which arises from the action of the flanges in forcing the truck to follow
the track curvature. This excess being a variable element of curve
resistance, we may expect to find that curve resistance reaches a minimum
value when this excess reduces to zero, that is, when the car speed reaches
the critical value referred to. This critical speed depends only on the
superelevation, the track gauge, and the radius of the track curvature.
The resulting variation of curve resistance with speed is indicated in
diagram below.
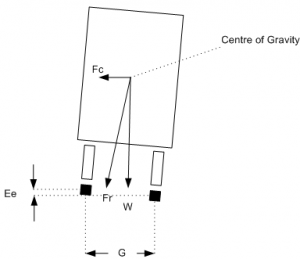
Forces on rolling stock transitioning a curve
8.6.5. Calculation of Curve Resistance
R = W F (D + L) 2 r
Where:
R = Curve resistance,
W = vehicle weight,
F = Coefficient of Friction,
0.1 – 0.3 for wet rail
0.5 for dry, smooth steel-to-steel
D = track gauge,
L = Rigid wheelbase,
r = curve radius.
(Source: The Modern locomotive by C. Edgar Allen - 1912)
8.6.6. Calculation of Curve Speed Impact
The above value represents the least value amount of resistance, which occurs at the equilibrium speed, and as described above will increase as the train speed increases and decreases from the equilibrium speed. This concept is shown pictorially in the following graph. Open Rails uses the following formula to model the speed impact on curve resistance:
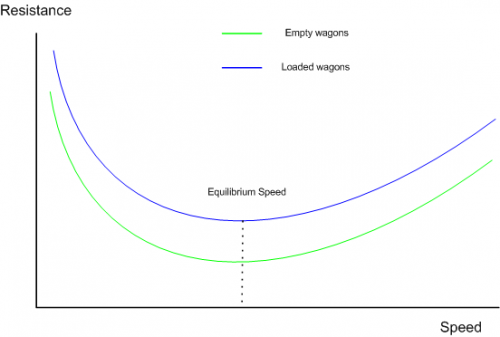
Generalisation of Variation of Curve Resistance With Speed
8.6.7. Further background reading
8.7. Curve Resistance - Application in OR
Open Rails models this function, and the user may elect to specify the known wheelbase parameters, or the above standard default values will be used. OR calculates the equilibrium speed in the speed curve module, however it is not necessary to select both of these functions in the simulator options TAB. Only select the function desired. By studying the Forces Information table in the HUD, you will be able to observe the change in curve resistance as the speed, curve radius, etc. vary.
8.7.1. OR Parameter Values
Typical OR parameter values may be entered in the Wagon section of the .wag or .eng file, and are formatted as below.:
ORTSRigidWheelBase ( 3in )
ORTSTrackGauge ( 4ft 8.5in) // (also used in curve speed module)
8.7.2. OR Default Values
The above values can be entered into the relevant files, or alternatively if they are not present, then OR will use the default values described below.
Rigid Wheelbase – as a default OR uses the figures shown above in the Typical Rigid Wheelbase Values section. The starting curve resistance value has been assumed to be 200%, and has been built into the speed impact curves. OR calculates the curve resistance based upon the actual wheelbases provided by the player or the appropriate defaults. It will use this as the value at Equilibrium Speed, and then depending upon the actual calculated equilibrium speed (from the speed limit module) it will factor the resistance up as appropriate to the current train speed.
Steam locomotive wheelbase approximation – the following approximation is used to determine the default value for the fixed wheelbase of a steam locomotive.
8.7.3. Typical Rigid Wheelbase Values
The following values are used as defaults where actual values are not provided by the player.
Rolling Stock Type |
Typical value |
|---|---|
Freight Bogie type stock (2 wheel bogie) |
5’ 6” (1.6764m) |
Passenger Bogie type stock (2 wheel bogie) |
8’ (2.4384m) |
Passenger Bogie type stock (3 wheel bogie) |
12’ (3.6576m) |
Typical 4 wheel rigid wagon |
11’ 6” (3.5052m) |
Typical 6 wheel rigid wagon |
12’ (3.6576m) |
Tender (6 wheel) |
14’ 3” (4.3434m) |
Diesel, Electric Locomotives |
Similar to passenger stock |
Steam locomotives |
Dependent on drive wheels #. Can be up to 20’+, e.g. large 2–10–0 locomotives |
Modern publications suggest an allowance of approximately 0.8 lb per ton (US) per degree of curvature for standard gauge tracks. At very slow speeds, say 1 or 2 mph, the curve resistance is closer to 1.0 lb (or 0.05% up grade) per ton per degree of curve.
8.8. Superelevation (Curve Speed Limit) – Theory
8.8.1. Introduction
When a train rounds a curve, it tends to travel in a straight direction and the track must resist this movement, and force the train to move around the curve. The opposing movement of the train and the track result in a number of different forces being in play.
8.8.2. 19th & 20th Century vs Modern Day Railway Design
In the early days of railway construction financial considerations were a big factor in route design and selection. Given that the speed of competing transport, such as horses and water transport was not very great, speed was not seen as a major factor in the design process. However as railway transportation became a more vital need for society, the need to increase the speed of trains became more and more important. This led to many improvements in railway practices and engineering. A number of factors, such as the design of the rolling stock, as well as the track design, ultimately influence the maximum speed of a train. Today’s high speed railway routes are specifically designed for the speeds expected of the rolling stock.
8.8.3. Centrifugal Force
Railway locomotives, wagons and carriages, hereafter referred to as rolling stock, when rounding a curve come under the influence of centrifugal force. Centrifugal force is commonly defined as:
The apparent force that is felt by an object moving in a curved path that acts outwardly away from the centre of rotation.
An outward force on a body rotating about an axis, assumed equal and opposite to the centripetal force and postulated to account for the phenomena seen by an observer in the rotating body.
For this article the use of the phrase centrifugal force shall be understood to be an apparent force as defined above.
8.8.4. Effect of Centrifugal Force
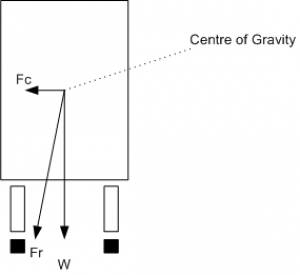
Forces at work when a train rounds a curve
When rolling stock rounds a curve, if the rails of the track are at the same elevation (i.e. the two tracks are at the same level) the combination of centrifugal force Fc and the weight of the rolling stock W will produce a resulting force Fr that does not coincide with the centre line of track, thus producing a downward force on the outside rail of the curve that is greater than the downward force on the inside rail (Refer to Figure 1). The greater the velocity and the smaller the radius of the curve (some railways have curve radius as low as 100m), the farther the resulting force Fr will move away from the centre line of track. Equilibrium velocity was the velocity at which a train could negotiate a curve with the rolling stock weight equally distributed across all the wheels.
If the position of the resulting force Fr approaches the outside rail, then the rolling stock is at risk of falling off the track or overturning. The following drawing, illustrates the basic concept described. Lateral displacement of the centre of gravity permitted by the suspension system of the rolling stock is not illustrated.
8.8.5. Use of Superelevation
This illustrates the concept.
In order to counteract the effect of centrifugal force Fc the outside rail of the curve may be elevated above the inside rail, effectively moving the centre of gravity of the rolling stock laterally toward the inside rail.
This procedure is generally referred to as superelevation. If the combination of lateral displacement of the centre of gravity provided by the superelevation, velocity of the rolling stock and radius of curve is such that resulting force Fr becomes centred between and perpendicular to a line across the running rails the downward pressure on the outside and inside rails of the curve will be the same. The superelevation that produces this condition for a given velocity and radius of curve is known as the balanced or equilibrium elevation.
8.8.6. Limitation of Superelevation in Mixed Passenger & Freight Routes
Typical early railway operation resulted in rolling stock being operated at less than equilibrium velocity (all wheels equally sharing the rolling stock weight ), or coming to a complete stop on curves. Under such circumstances excess superelevation may lead to a downward force sufficient to damage the inside rail of the curve, or cause derailment of rolling stock toward the centre of the curve when draft force is applied to a train. Routine operation of loaded freight trains at low velocity on a curve superelevated to permit operation of higher velocity passenger trains will result in excess wear of the inside rail of the curve by the freight trains.
Thus on these types of routes, superelevation is generally limited to no more than 6 inches.
8.8.7. Limitation of Superelevation in High Speed Passenger Routes
Modern high speed passenger routes do not carry slower speed trains, nor expect trains to stop on curves, so it is possible to operate these routes with higher track superelevation values. Curves on these types of route are also designed with a relatively gentle radius, and are typically in excess of 2000m (2km) or 7000m (7km) depending on the speed limit of the route.
Parameters |
France |
Germany |
Spain |
Korea |
Japan |
|---|---|---|---|---|---|
Speed (km/h) |
300/350 |
300 |
350 |
300/350 |
350 |
Horizontal curve radius (m) |
10000 (10km) |
7000 (7km) |
7000 (7km) |
7000 (7km) |
4000 (4km) |
Superelevation (mm) |
180 |
170 |
150 |
130 |
180 |
Max Grade (mm/m) |
35 |
40 |
12.5 |
25 |
15 |
Cant Gradient (mm/s) |
50 |
34.7 |
32 |
N/A |
N/A |
Min Vertical radius (m) |
16000 (16km) |
14000 (14km) |
24000 (24km) |
N/A |
10000 (10km) |
Table: Curve Parameters for High Speed Operations (Railway Track Engineering by J. S. Mundrey)
8.8.8. Maximum Curve Velocity
The maximum velocity on a curve may exceed the equilibrium velocity, but must be limited to provide a margin of safety before overturning velocity is reached or a downward force sufficient to damage the outside rail of the curve is developed. This velocity is generally referred to as maximum safe velocity or safe speed. Although operation at maximum safe velocity will avoid overturning of rolling stock or rail damage, a passenger riding in a conventional passenger car will experience centrifugal force perceived as a tendency to slide laterally on their seat, creating an uncomfortable sensation of instability. To avoid passenger discomfort, the maximum velocity on a curve is therefore limited to what is generally referred to as maximum comfortable velocity or comfortable speed. Operating experience with conventional passenger cars has led to the generally accepted practice, circa 1980, of designating the maximum velocity for a given curve to be equal to the result for the calculation of equilibrium velocity with an extra amount added to the actual superelevation that will be applied to the curve. This is often referred to as unbalanced superelevation or cant deficiency. Tilt trains have been introduced to allow faster train operation on tracks not originally designed for high speed operation, as well as high speed railway operation. The tilting of the passenger cab allows greater values of unbalanced superelevation to be used.
8.8.9. Limitation of Velocity on Curved Track at Zero Cross Level
The concept of maximum comfortable velocity may also be used to determine the maximum velocity at which rolling stock is permitted to round curved track without superelevation and maintained at zero cross level. The lead curve of a turnout located between the heel of the switch and the toe of the frog is an example of curved track that is generally not super elevated. Other similar locations would include yard tracks and industrial tracks where the increased velocity capability made possible by super elevation is not required. In such circumstances the maximum comfortable velocity for a given curve may also be the maximum velocity permitted on tangent track adjoining the curve.
8.8.10. Height of Centre of Gravity
Operation on a curve at equilibrium velocity results in the centre of gravity of the rolling stock coinciding with a point on a line that is perpendicular to a line across the running rails and the origin of which is midway between the rails. Under this condition the height of the centre of gravity is of no consequence as the resulting force Fr coincides with the perpendicular line described above. When rolling stock stops on a super elevated curve or rounds a curve under any condition of non-equilibrium the resulting force Fr will not coincide with the perpendicular line previously described and the height of the centre of gravity then becomes significant in determining the location of the resulting force Fr relative to the centre line of the track. The elasticity of the suspension system of rolling stock under conditions of non-equilibrium will introduce a roll element that affects the horizontal displacement of the centre of gravity and that must also be considered when determining the location of the resulting force Fr.
8.8.11. Calculation of Curve Velocity
The generic formula for calculating the various curve velocities is as follows:
Where:
E = Ea (track superelevation) + Ec (unbalanced superelevation)
g = acceleration due to gravity
r = radius of curve
G = track gauge
8.8.12. Typical Superelevation Values & Speed Impact – Mixed Passenger & Freight Routes
The values quoted below are “typical” but may vary from country to country.
Track superelevation typically will not be more than 6 inches (150mm). Naturally, depending upon the radius of the curve, speed restrictions may apply.
Normally unbalanced superelevation is typically restricted to 3 inches (75mm), and is usually only allowed for passenger stock.
Tilt trains may have values of up to 12 inches (305mm).
8.8.13. Typical Superelevation Values & Speed Impact – High Speed Passenger Routes
Cant D (Superelevation) (mm) |
Cant deficiency (Unbalanced Superelevation) I (mm) |
|
|---|---|---|
CEN (draft) – Tilting trains |
180–200 |
300 |
Czech Rep. – Tilting trains |
150 |
270 |
France – Tilting trains |
180 |
260 |
Germany – Tilting trains |
180 |
300 |
Italy – Tilting trains |
160 |
275 |
Norway – Tilting trains |
150 |
280 |
Spain – Tilting trains (equivalent for standard gauge) |
160 (139) |
210 (182) |
Sweden – Tilting trains |
150 |
245 |
UK – Tilting trains |
180 |
300 |
Table: Superelevation limits (source - Tracks for tilting trains - A study within the Fast And Comfortable Trains (FACT) project by B. Kufver, R. Persson)
8.9. Superelevation (Curve Speed Limit) Application in OR
Open Rails implements this function, and has standard default values applied. The user may elect to specify some of the standard parameters used in the above formula.
8.9.1. OR Superelevation Parameters
Typical OR parameters can be entered in the Wagon section of the .wag or .eng file, and are formatted as below.
ORTSUnbalancedSuperElevation ( 3in )
ORTSTrackGauge( 4ft 8.5in)
8.9.2. OR Superelevation Default Values
The above values can be entered into the relevant files, or alternatively OR will default to the following functionality.
OR will initially use the speed limit value from the route’s .trk file to determine whether the route is a conventional mixed freight and passenger route or a high speed route.
Speed limit < 200km/h (125mph) – Mixed Freight and Pass route
Speed limit > 200km/h (125mph) – High speed passenger route
Default values of tracksuperelevation will be applied based upon the above classifications.
Track gauge will default to the standard value of 4’ 8.5” (1435mm).
Unbalanced superelevation (Cant Deficiency) will be determined from the value entered by the user, or will default to the following values:
Conventional Freight – 0” (0mm)
Conventional Passenger – 3” (75mm)
Engines & tenders – 6” (150mm)
Tilting trains require the addition of the relevant unbalanced superelevation information to the relevant rolling stock files.
8.10. Tunnel Friction – Theory
8.10.1. Introduction
When a train travels through a tunnel it experiences increased resistance to the forward movement.
Over the years there has been much discussion about how to accurately calculate tunnel resistance. The calculation methodology presented (and used in OR) is meant to provide an indicative representation of the impacts that tunnel resistance will have on rolling stock performance.
8.10.2. Factors Impacting Tunnel Friction
In general, the train aerodynamics are related to aerodynamic drag, pressure variations inside the train, train-induced flows, cross-wind effects, ground effects, pressure waves inside the tunnel, impulse waves at the exit of tunnel, noise and vibration, etc. The aerodynamic drag is dependent on the cross-sectional area of the train body, train length, the shape of train fore- and after-bodies, the surface roughness of train body, and geographical conditions around the traveling train. The train-induced flows can influence passengers on a subway platform and is also associated with the cross-sectional area of the train body, the train length, the shape of train fore- and after-bodies, surface roughness of train body, etc.
A high speed train entering a tunnel generates a compression wave at the entry portal that moves at the speed of sound in front of the train. The friction of the displaced air with the tunnel wall produces a pressure gradient and, as a consequence, a rise in pressure in front of the train. On reaching the exit portal of the tunnel, the compression wave is reflected back as an expansion wave but part of it exits the tunnel and radiates outside as a micro-pressure wave. This wave could cause a sonic boom that may lead to structural vibration and noise pollution in the surrounding environment. The entry of the tail of the train into the tunnel produces an expansion wave that moves through the annulus between the train and the tunnel. When the expansion pressure wave reaches the entry portal, it is reflected towards the interior of the tunnel as a compression wave. These compression and expansion waves propagate backwards and forwards along the tunnel and experience further reflections when meeting with the nose and tail of the train or reaching the entry and exit portals of the tunnel until they eventually dissipate completely.
The presence of this system of pressure waves in a tunnel affects the design and operation of trains, and they are a source of energy losses, noise, vibrations and aural discomfort for passengers.
These problems are even worse when two or more trains are in a tunnel at the same time. Aural comfort is one of the major factors determining the area of new tunnels or the maximum train speed in existing tunnels.
8.10.3. Importance of Tunnel Profile
As described above, a train travelling through a tunnel will create a bow wave of air movement in front of it, which is similar to a piston effect. The magnitude and impact of this effect will principally be determined by the tunnel profile, train profile and speed.
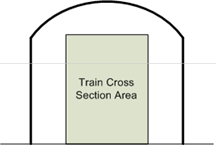
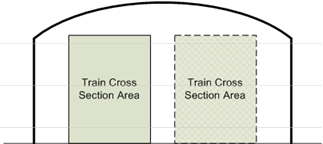
Typical tunnel profiles are shown in the diagrams.
As can be seen from these diagrams, the smaller the tunnel cross sectional area compared to the train cross sectional area, the less air that can escape around the train, and hence the greater the resistance experienced by the train. Thus it can be understood that a single train in a double track tunnel will experience less resistance then a single train in a single track tunnel.
8.10.4. Calculation of Tunnel Resistance
where
Ft – tunnel cross-sectional area (m2) |
Ftr – train cross-sectional area (m2) |
\(\rho\) – density of air ( = 1.2 kg/m3) |
Rt – tunnel perimeter (m) |
Ltr – length of train (m) |
Lt – length of tunnel (m) |
v – train velocity (m/s) |
P – locomotive mass (t) |
Wt – additional aerodynamic drag in tunnel (N/kN) |
G – train mass (t) |
Source: Reasonable compensation coefficient of maximum gradient in long railway tunnels by Sirong YI*, Liangtao NIE, Yanheng CHEN, Fangfang QIN
8.11. Tunnel Friction – Application in OR
Tunnel resistance is designed to model the relative impact on the current train, and does not take into account multiple trains in the tunnel at the same time.
Tunnel resistance values can be seen in the Train Forces HUD.
The default tunnel profile is determined by the route speed recorded in the TRK file.
8.11.1. OR Parameters
The following parameters maybe included in the TRK file to overwrite standard default values used by Open Rails:
ORTSSingleTunnelArea ( x )– Cross section area of single track tunnel – units areaORTSSingleTunnelPerimeter ( x )– Perimeter of single track tunnel – units distanceORTSDoubleTunnelArea ( x )– Cross section area of double track tunnel – units areaORTSDoubleTunnelPerimeter ( x )– Perimeter of double track tunnel – units distance
To insert these values in the .trk file, it is suggested that you add them just prior to the last parenthesis. You may also use an Include file method, described here.
8.11.2. OR Defaults
Open Rails uses the following standard defaults, unless overridden by values included in the TRK file.
Speed |
1 track |
2 tracks |
|---|---|---|
Tunnel Perimeter |
||
< 160 km/h |
21.3 m |
31.0 m |
160 < 200 km/h |
25.0 m |
34.5 m |
200 < 250 km/h |
28.0 m |
35.0 m |
250 < 350 km/h |
32.0 m |
37.5 m |
Tunnel Cross Sectional Area |
||
< 120 km/h |
27.0 m2 |
45.0 m2 |
< 160 km/h |
42.0 m2 |
76.0 m2 |
200 km/h |
50.0 m2 |
80.0 m2 |
250 km/h |
58.0 m2 |
90.0 m2 |
350 km/h |
70.0 m2 |
100.0 m2 |
8.12. Wind Resistance
The default Davis resistance formula is only valid for train operation in STILL air. At high train speeds, and especially for Very Fast trains the impact of wind can be quite significant, and special consideration is required when designing rolling stock, etc. If wind is present, then the impact of drag forces on the train will vary, and be in addition to the values calculated in the default (or still air) conditions.
The wind resistance in OR is modeled by the following two components:
Wind Drag Resistance - If a train is heading into a headwind then the train will experience greater resistance to movement, similarly if the train has a tailwind, then the trains resistance will decrease as the wind provides a “helping hand”. As the wind swings from the head of the train to the rear resistance will decrease. When the wind is perpendicular to the train, drag impact due to the wind will be zero.
Wind Lateral Force Resistance - When the wind blows from the side of the train, the train will be pushed against the outside track rail, thus increasing the amount of resistance experienced by the train. As wind only becomes significant at higher train speeds, the wind resistance calculation only commences once the train speed exceeds 5 mph.
The amount of wind resistance that the train is experiencing is shown in the FORCES INFORMATION HUD. (see attached screenshot) The current wind conditions are also shown in the HUD, and include the Wind speed and direction, train direction, and the resulting vectors for the combined train and wind speed. The value in the Friction column is the default still air conditions as calculated by the Davis formula. It should be noted that OR calculates the Wind Drag resistance as a difference compared to the still air Davis C value, and hence it is possible for values in the Wind column to go negative on occasions. This is most likely when the wind is blowing from the rear of the train, ie the ResWind direction is greater then 90°C degrees, and hence the wind is actually aiding the train movement, and in effect reducing the amount of still air resistance.
The wind model has been adjusted in the following way:
Wind Update speed - 1 sec
Wind direction will always be within +/- 45°C degrees of the randomly selected default value selected at startup
Wind speed is limited to approx 10mph.
The Wind Resistance model will use default information, such as the width and height of the stock from the Size statement, so by default it is not necessary to add any additional parameters for its operation. However for those who like to customise, the following parameters can be inputted via the WAG file or section.
ORTSWagonFrontalArea – The frontal cross sectional area of the wagon. The default units
are in ft^2, so if entering metres, include the Units of Measure.
ORTSDavisDragConstant – OR assigns a default drag constant based on the type of
rolling stock. For more specifity or for less typical types of rolling stock, the drag
coefficient can be entered manually. Typical values are unitless in the range of 0.0002 - 0.0024.
8.13. Track Sanding
Sanding of the track is required at times to increase the wheel adhesion.
Open Rails supports air and steam operated track sanders which consume air or steam and sand. Typically OR has standard defaults which it uses to allow track sanding to operate, however if the user knows the actual values for the locomotive that they are modelling then they can override these values by entering the following parameters in the engine section of the ENG file. Note - if values are not known then it is highly recommended that the default values be used.
When using any of the following parameters, the sanding system type needs to be set by allocating either “Steam” or
“Air” to the SandingSystemType ( x ) parameter in engine section of file.
Steam Consumption
ORTSMaxTrackSanderSteamConsumptionForward - total steam consumption for all sanders when traveling in
forward direction, ie in front of wheel.
ORTSMaxTrackSanderSteamConsumptionForward - total steam consumption for all sanders when traveling in
reverse direction, ie behind wheel. Note, = 0 when not used.
All steam consumption parameters are in lbs/sec.
For steam sanding there will be a visible presence of steam when the sander is operated, this steam effect can be added by using one or both of the following aparmeters.
SanderSteamExhaustForwardFX - steam effect when travelling forward, ie in front of wheel.
SanderSteamExhaustReverseFX - steam effect when travelling in reverse, ie in behind the wheel.
Air Consumption
ORTSMaxTrackSanderAirConsumptionForward - total air consumption for all sanders when traveling in reverse
direction, ie behind wheel. Note, = 0 when not used.
ORTSMaxTrackSanderAirConsumptionForward - total air consumption for all sanders when traveling in forward
direction, ie in front of wheel.
All air consumption parameters are in cuft/sec.
Sand Consumption
ORTSMaxTrackSanderSandConsumptionForward - total sand consumption for all sanders when traveling in forward
direction, ie in front of wheel.
ORTSMaxTrackSanderSandConsumptionReverse - total sand consumption for all sanders when traveling in reverse
direction, ie behind wheel. Note, = 0 when not used.
All sand consumption parameters are in cuft/sec.
8.14. Hammer Blow
Hammer blow is as a result of the weights added to the wheels (eg connecting and reciprocating rods) of a steam engine. The Excess (or Over) Balance weight was the weight that contributed to the hammer blow of the wheel, and it increased typically with the square of the wheel speed.
When the hammer force exceeded the weight on the wheel it was possible for the wheel to lift off the rails, this created a “hammering effect” on the rails, which could damage track and other infrastructure such as bridges.
The Hammer force is recorded in the HuD for the steam locomotive, and it will be in white text when “normal”, yellow text when within 10% of the point where the wheel will start to lift off the track, and red when the wheel is lifting off the track.
As a result of high hammer forces, some locomotives were speed restricted to prevent excessive damage to track infrastructure.
OR will use default values to set this feature up. If the Excess (or Over) Balance weight is known for a locomotive
it can be entered using ExcessRodBalance, as a mass value.
8.15. Trailing Locomotive Resistance
Typically only one set of resistance parameters is allowed for each WAG file. In the case of locomotives this can create issues as a leading locomotive will have a higher drag resistance then a trailing locomotive.
OR automatically adjusts the Drag resistance for trailing locomotives based upon the ratio of the original Davis formula.
However for those who like to customise, the following parameter can be inputted via the WAG file or section.
ORTSTrailLocomotiveResistanceFactor – The constant value by which the leading locomotive resistance
needs to be multiplied for trailing operation (eg: 0.5 halves resistance, default 0.2083).
For steam locomotive tenders it may be necessary to enter this value depending upon the Drag constant used to calculate the tender resistance.
8.16. OR-Specific Include Files for Modifying MSTS File Parameters
8.16.1. Modifications to .eng and .wag Files
In the preceding paragraphs many references have been made to OR-specific parameters and tables to be included in .eng and .wag files. MSTS is in general quite tolerant if it finds unknown parameters and even blocks within .eng and .wag files, and continues running normally. However this way of operating is not encouraged by the OR team. Instead, a cleaner approach, as described here, has been implemented.
Within the trainset folder containing the .eng and .wag files to be
upgraded, create a subfolder named OpenRails. Only OR will read
files from this folder. Within this subfolder a
text file named xxxx.eng or xxxx.wag, where xxxx.eng or xxxx.wag is the
name of the original file, must be created.
This new file may contain either:
all of the information included in the original file (using (modified parts where desired) plus the OR-specific parts if any, or:
at its beginning only an include reference to the original file, followed by the modified parts and the OR-specific parts. This does not apply to the
Name()statement and the Loco Description Information, where in any case the data in the base .eng file is retained.
An example of an OR-specific bc13ge70tonner.eng file to be placed into the
OpenRails subfolder that uses the second possibility is as follows:
include ( ../bc13ge70tonner.eng )
Wagon (
MaxReleaseRate ( 2.17 )
MaxApplicationRate ( 3.37 )
MaxAuxilaryChargingRate ( .4 )
EmergencyResChargingRate ( .4 )
BrakePipeVolume ( .4 )
ORTSUnbalancedSuperElevation ( 3in )
Engine (
AirBrakeMainresvolume ( 16 )
MainResChargingRate ( .5 )
BrakePipeChargingRate ( 21 )
EngineBrakeReleaseRate ( 12.5 )
EngineBrakeApplicationRate ( 12.5 )
BrakePipeTimeFactor ( .00446 )
BrakeServiceTimeFactor ( 1.46 )
BrakeEmergencyTimeFactor ( .15 )
ORTSMaxTractiveForceCurves (
0 (
0 0 50 0 )
.125 (
0 23125
.3 23125
1 6984
2 3492
5 1397
10 698
20 349
50 140 )
.25 (
0 46250
.61 46250
1 27940
2 13969
5 5588
10 2794
20 1397
50 559 )
.375 (
0 69375
.91 69375
2 31430
5 12572
10 6287
20 3143
50 1257 )
.5 (
0 92500
1.21 92500
5 22350
10 11175
20 5588
50 2235 )
.625 (
0 115625
1.51 115625
5 34922
10 17461
20 8730
50 3492 )
.75 (
0 138750
1.82 138750
5 50288
10 25144
20 12572
50 5029 )
.875 (
0 161875
2.12 161875
5 68447
10 34223
20 17112
50 6845 )
1 (
0 185000
2.42 185000
5 89400
10 44700
20 22350
50 8940 )
)
)
)
Take into account that the first line must be blank (before the include line).
In case of more trainsets residing in the same folder and requiring the same
additional .wag or .eng files with exactly the same contents, it is useful to
use the conventional filename [[SameName]].
OR will replace that filename with the filename of the file containing the Include
statement. So, in the case of the example above, instead of:
include ( ../bc13ge70tonner.eng )
the following can be written:
include ( ../[[SameName]] )
This way all additional .wag or .eng files referring to similar trainsets would have exactly the same contents, drastically reducing editing time.
The ORTSMaxTractiveForceCurves are formed by blocks of pairs of parameters
representing speed in metres per second and tractive force in Newtons;
these blocks are each related to the value of the throttle setting present
at the top of each block. For intermediate values of the speed an
interpolated value is computed to get the tractive force, and the same
method applies for intermediate values of the throttle.
If the parameter that is modified for OR is located within a named (i.e.
bracketed) block in the original file, then in the OpenRails file it must be
included in a matching bracketed block. For instance, it is not possible to
replace only a part of the Lights() block. It must be replaced in its
entirety. For example, to use a different Cabview(), it must be enclosed
in an Engine block:
Engine ( BNSF4773
CabView ( dash9OR.cvf )
)
This is also required in the case of certain Brake parameters; to correctly manage reinitialization of brake parameters, the entire block containing them must be present in the .eng file in the OpenRails folder.
This use of the Include command can be extended to apply to sections of
groups of .wag or .eng files that the user wishes to replace by a specific
block of data – the parameters can be provided by a text file located
outside the usual MSTS folders; e.g. brake parameters.
8.17. Common locomotive subsystems
8.17.1. Battery
The battery provides a low voltage power supply of the train car. It is activated via the battery switch. If the low voltage power supply is disabled, all of the systems of the locomotive are disabled (for example, the circuit breaker opens and the pantograph falls down).
The battery switch of all vehicles in a consist can be controlled by
Control Battery Switch Close and Control Battery Switch Open commands
( <Insert> and <Ctrl+Insert> by default ). The status of the battery switch
is indicated by the Battery switch value in the HUD view.
Three behaviours are available:
By default, the battery switch is always closed (equivalent to MSTS).
The battery switch can also be controlled directly by the driver with a switch. To get this behaviour, put the parameter
ORTSBattery( Mode ( Switch ) )in the Engine section of the ENG file.The battery switch can also be controlled directly by the driver with two push buttons. To get this behaviour, put the parameter
ORTSBattery( Mode ( PushButtons ) )in the Engine section of the ENG file.
In real life, the battery switch may not
close instantly, so you can add a delay with the optional parameter
ORTSBattery( Delay ( ) ) (by default in seconds). When delay is used in combination with push buttons
you have to keep pressing the button until the battery is (dis)connected.
It is possible for the battery switch to be switched on at the start of the simulation.
To activate this behaviour, you can add the optional parameter ORTSBattery( DefaultOn ( 1 ) )
The voltage and energetic capacity of the battery can be indicated using the Voltage and MaxCapacity
parameters. The performance of the battery charger, which is powered by the power converters, can be
adjusted using the ChargerPower and ChargerVoltage parameters.
Optionally, it is possible to define a capacity-voltage curve such that voltage becomes
lower when the battery is discharged, using ChargeVoltageCurve. Battery discharge is not implemented yet.
Example:
Engine (
ORTSBattery (
Mode ( PushButtons )
Delay ( 2s )
DefaultOn ( 1 )
Voltage ( 72V )
MaxCapacity ( 50kWh )
ChargeVoltageCurve (
0 0
5kWh 50V
30kWh 72V
50kWh 80V
)
ChargerVoltage ( 80V )
ChargerPower ( 10kW )
)
)
The state of the battery switch can be used in the power supply scripts, cabview controls, and train car lighting.
8.17.2. Master key
The master key controls the power supply of the cab. If the cab power supply is disabled, all of the systems of the cab are disabled (for example, the speed indicator switches off, the throttle controller is disabled, etc.).
The master key of the current cab can be controlled by the Control Master Key command
( <Enter> by default ). The status of the master key is indicated by the Master key value in the HUD view.
Two behaviours are available:
By default, the master key is always on (equivalent to MSTS).
The master key can also be controlled by the driver. To get this behaviour, put the parameter
ORTSMasterKey ( Mode ( Manual ) )in the Engine section of the ENG file.
In real life, when the master key is switched off, the cab systems may not switch off
instantly, so you can add a delay with the optional parameter
ORTSMasterKey ( DelayOff ( ) ) (by default in seconds).
The master key can also control the headlights on multiple units. For example, when the master key is switched on,
the red lights can automatically be replaced by the white lights. In order to activate this behaviour, put The
parameter ORTSMasterKey ( HeadlightControl ( 1 ) ) in the Engine section of the ENG file.
Example:
Engine (
ORTSMasterKey (
Mode ( Manual )
DelayOff ( 10s )
HeadlightControl ( 1 )
)
)
The state of the master key can be used in the power supply scripts and the cabview controls.
8.17.3. Service retention
The service retention allows for the systems of the train to still be supplied with electricity even if a cab is not in service. It maintains the pantographs up and the circuit breaker closed even if the master key is switched off.
This feature can only be used with a custom power supply script.
The service retention can be controlled by the Control Service Retention and Control Service Retention Cancellation commands
( <Delete> and <Ctrl+Delete> by default ).
Cabview controls are also available for this functionality.
8.17.4. Electric train supply
The electric train supply supplies passenger cars and heated wagons with electricity in order to power the battery chargers, the heating, ventilation and air conditioning systems.
The electric train supply can be controlled by the Control Electric Train Supply command
( <Alt+B> by default ). The status of the electric train supply switch state is indicated
by the Electric train supply value in the HUD view.
Three behaviours are available:
By default, the electric train supply is automatic (it will switch on as soon as the auxiliary power supply is on).
The locomotive can also be not fitted with electric train supply. To get this behaviour, put the parameter
ORTSElectricTrainSupply ( Mode ( Unfitted ) )in the Engine section of the ENG file.The electric train supply can also be controlled by the driver. To get this behaviour, put the parameter
ORTSElectricTrainSupply ( Mode ( Switch ) )in the Engine section of the ENG file.
Example:
Engine (
ORTSElectricTrainSupply (
Mode ( Switch )
)
)
If the locomotive is a diesel locomotive, the power consumed by the cars on the electric train supply is no longer available for traction.
The state of the electric train supply can be used in the locomotive power supply scripts, in the passenger car power supply scripts and the cabview controls.
8.17.5. Train Control System
The Train Control System is a system that ensures the safety of the train.
In MSTS, 4 TCS monitors were defined: the vigilance monitor, the overspeed monitor, the emergency stop monitor and the AWS monitor. Open Rails does not support the AWS monitor.
In order to define the behavior of the monitors, you must add a group of
parameters for each monitor in the Engine section of the .eng file. These
groups are called VigilanceMonitor(), OverspeedMonitor(),
EmergencyStopMonitor() and AWSMonitor().
In each group, you can define several parameters, which are described in the tables below.
Parameter |
Description |
Recom’d Input Units |
Typical Examples |
|---|---|---|---|
General Parameters |
|||
MonitoringDeviceMonitorTimeLimit( x ) |
Period of time elapsed before the alarm or the penalty is triggered |
Time |
|
MonitoringDeviceAlarmTimeLimit( x ) |
Period for which the alarm sounds prior to the penalty being applied |
Time |
|
MonitoringDevicePenaltyTimeLimit( x ) |
Period in seconds before the penalty can be reset once triggered |
Time |
|
MonitoringDeviceCriticalLevel( x ) |
Speed at which monitor triggers |
Speed |
|
MonitoringDeviceResetLevel( x ) |
Speed at which monitor resets |
Speed |
|
MonitoringDeviceAppliesFullBrake( x ) |
Sets whether full braking will be applied |
Boolean – 0 or 1 |
|
MonitoringDeviceAppliesEmergencyBrake( x ) |
Sets whether emergency braking will be applied |
Boolean – 0 or 1 |
|
MonitoringDeviceAppliesCutsPower( x ) |
Sets whether the power will be cut to the locomotive |
Boolean – 0 or 1 |
|
MonitoringDeviceAppliesShutsDownEngine( x ) |
Sets whether the engine will be shut down |
Boolean – 0 or 1 |
|
MonitoringDeviceResetOnDirectionNeutral( x ) |
Sets whether the monitor resets when the reverser is in the neutral position |
Boolean – 0 or 1 |
|
MonitoringDeviceResetOnResetButton( x ) |
Sets whether the monitor resets when the reset button is pushed |
Boolean – 0 or 1 |
|
MonitoringDeviceResetOnZeroSpeed( x ) |
Set whether the monitor resets when the speed is null |
Boolean – 0 or 1 |
|
Specific parameters of the Overspeed Monitor |
|||
MonitoringDeviceAlarmTimeBeforeOverSpeed( x ) |
Period for which the alarm sounds prior to the penalty being applied |
Time |
|
MonitoringDeviceTriggerOnOverspeed( x ) |
Maximum allowed speed |
Speed |
|
MonitoringDeviceTriggerOnTrackOverspeed( x ) |
Activates the overspeed margin control |
Boolean – 0 or 1 |
|
MonitoringDeviceTriggerOnTrackOverspeedMargin( x ) |
Allowed overspeed |
Speed |
|
Other parameters in the Engine section of the ENG file are used by the TCS:
DoesBrakeCutPower( x )sets whether applying brake on the locomotive cuts the traction (1 for enabled, 0 for disabled)BrakeCutsPowerAtBrakeCylinderPressure( x )sets the minimum pressure in the brake cylinder that cuts the traction (by default 4 PSI)OrtsEmergencyBrakeCutsDynamicBrakesets whether an emergency braking disables dynamic brakes
8.17.6. Train Derailment
Open Rails calculates when it is likely that a train derailment has occurred. The derailment modeled is based upon the wheel climbing the rail when the train is in a curve. Light (empty wagons) can sometimes derail due to ‘string lining’ where the train forces attempt to pull the train in a straight line, rather then following the curve.
OR calculates the Nadal Criteria for each wagon, and then calculates the actual L/V ratio based upon the wagon weight and the relevant “in train” forces. Open Rails uses some calculated default parameters for the various parameters required to determine the actual L/V ratio, however more accurate results will be obtained if actual parameters are entered into the ENG or WAG file. The derailment calculations use information relating to the wagon dimensions, weight and wheel profile information.
Wheel profile details can be entered with the following two parameters:
ORTSMaximumWheelFlangeAngle- Wheel flange angle is defined as the maximum angle of the wheel flange relative to the horizontal axis.
UoM - Angle (deg, radians) - default is rad. Typically this value maybe between approx 60 and 75 degrees.
ORTSWheelFlangeLength- Wheel flange length is defined as the length of flange starting from the beginning of the maximum flange angle
to the point where flange angle reduces to 26.6 degrees. UoM - Distance (m, in, ft, etc) - default is m
8.18. EOT - End of train device
8.18.1. General
See https://en.wikipedia.org/wiki/End-of-train_device for basic info about EOTs.
EOTs in Open Rails may be of three different levels (types):
- No communication: "dumb" EOTs, like flags or flashing lamps
- One way: the EOT is capable to transmit to the lead locomotive the brake pipe pressure at the end of the train
- Two way: the EOT is also capable to receive a command to vent the air brake pipe.
8.18.2. How to define an EOT
EOTs must be defined within subfolders of the Trains\ORTS_EOT folder. These subfolders contain
the same file set present in a subfolder of the Trains\Trainset folder; the file defining an EOT
has the same format as a .wag file, but it must have an .eot extension. To define the level of the EOT
the following block must be added at the end of the .eot file (after the closing parenthesis of the
Wagon() block):
ORTSEOT (
Level ( "level" )
)
level may assume following values: NoComm, OneWay and TwoWay.
Usually EOTs were provided as a very short wagon for simulation with MSTS or OR. To upgrade it to a functioning EOT for OR following simple steps are needed:
- Create the ``Trains\ORTS_EOT`` folder
- copy the EOT subfolder present in the ``Trains\Trainset`` folder into the ``Trains\ORTS_EOT`` folder
- change the extension of the .wag file(s) to .eot
- add at the end of the .eot file the ORTSEOT block.
For Open Rails the EOT is a special type (a subclass) of wagon, with specific features. As such it appears at the end of the train in the Train Operations window.
8.18.3. How to attach and detach an EOT at the end of a train
An EOT may be attached at the end of a train (be it player train or AI train) already at game start, by inserting at the end of the .con file a block like the following one:
ORTSEot (
EOTData ( EOT_OR TrainSimulations_EOT )
UiD ( 203 )
)
where ORTSEot and EOTData are fixed keywords, EOT_OR is the name of the .eot file
and TrainSimulations_EOT is the folder where EOT_OR.eot resides. TrainSimulations_EOT is
a subfolder of Trains\ORTS_EOT.
If an EOT is present at the end of the train since game start, it will be fully operating from the beginning (in one-way state if it is a one-way EOT, and in two-way state if it is a two-way EOT).
An EOT may also be attached at the end of the actual player train using the EOT list window
which can be recalled by pressing <Ctrl+F9>. Such window lists all .eot files present in
the subfolders of Trains\ORTS_EOT. If the train has an EOT at the end of it, the related row
in the EOT list window will be red. If the train has no EOT at the end of it (no red row), it can
be attached at the end of the train with following sequence:
within the EOT list window click on the row showing the desired EOT; the row will become red and the EOT will physically appear at the end of the train
if it is an One Way or Two Way EOT type, connect its brake hose with the Car Operations Window (see here)
using the Car Operations Window on the wagon preceding the EOT, open the rear angle cock.
When an EOT is attached to the actual player train, a line indicating its presence will appear in the Train Driving Window (F5). The EOT will be in Disarmed state (that is fully disabled).
To detach an EOT from the end of the actual player train, recall the EOT list window and click on the red row. The EOT will disappear. Always remember to detach the EOT when this would occur in reality (e.g. when rear coupling other wagons, when decoupling the rear of the train and in general before shunting).
8.18.4. How to arm (enable) or disarm a one-way or two-way EOT
The arm and disarm procedure must be performed from the cabview, as the controls are available only through mouse. So it requires an equipped cabview. See here for a list of the available controls.
The procedure for a two-way EOT is explained basing on the picture below, which shows a sample case based on a cab of Borislav Miletic.
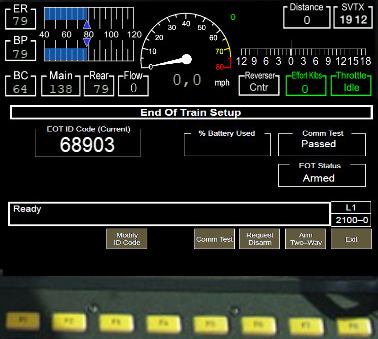
- The possible states for a two-way EOT are following ones::
Disarmed,
CommTestOn,
Armed,
LocalTestOn,
ArmNow,
ArmedTwoWay
The EOT state is shown in the Train Driving window using above terminology, while the latter is a bit different in the EOT setup display in the sample cab following a real case (but it may be modified).
When the EOT is attached to the train with the EOT List window, the EOT is in
Disarmed state. An EOT ID appears as a 5-digit random number. In the cab
the Comm Test field shows Failed.
By clicking on the key below the Comm Test soft button, the state in the
Train Driving window passes to the CommTestOn state. When the CommTestOn is
terminated, the state in the Train Driving window passes to the Armed state for
the one-way EOTs, and to the LocalTestOn state for the two-way EOTs.
In the EOT setup display the Comm Test field shows Passed and the EOT
Status Field shows One Way. Now the Rear field shows the brake pipe
pressure at the end of the train.
The LocalTestOn in two-way EOTs is about 25 seconds long. After such time
interval the state shown in the Train Driving window passes to the ArmNow state, and
the EOT status in the display shows Arm Now.
At this point the train driver must click the key below the Arm Two-Way soft button.
The EOT Passes to the ArmedTwoWay state, that is shown as Armed in the
EOT status within the EOT Status display.
By clicking the key below the Request Disarm soft button, the EOT returns to
the Disarmed state.
8.18.5. Emergency brake through EOT
Two-way EOTs, when in the ArmedTwoWay state, can be requested to vent the brake pipe
and therefore to cause an emergency brake. This occurs automatically when an Emergency
brake is triggered, and also manually when the ORTS_EOT_EMERGENCY_BRAKE
control is activated. The manual activation may also occur by pressing
<Ctrl+Backspace> .